


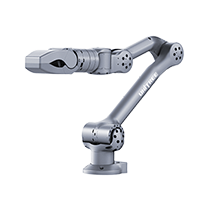





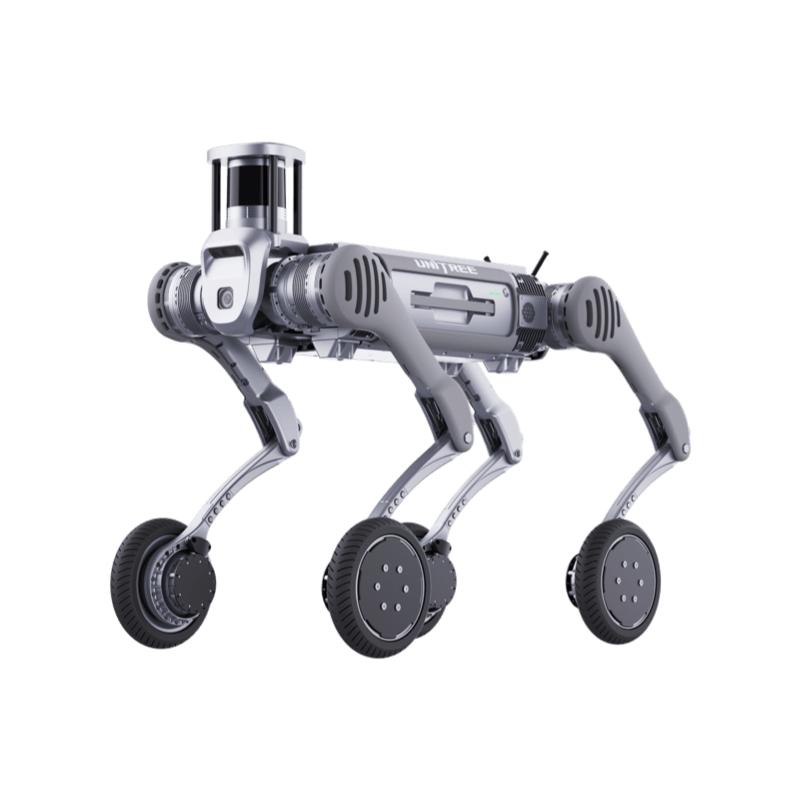












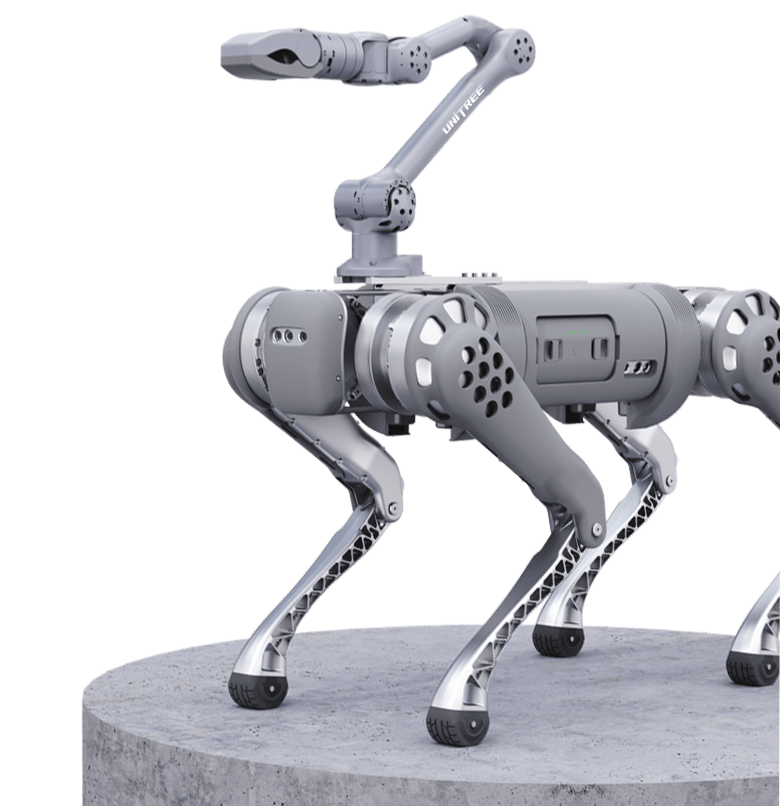
Идеальная синергия
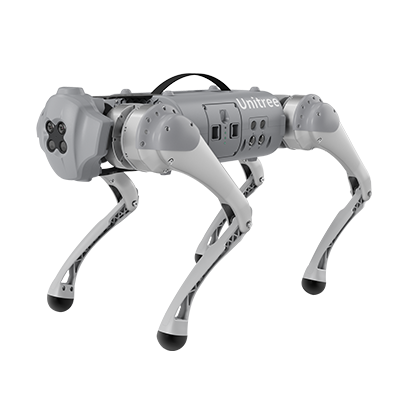
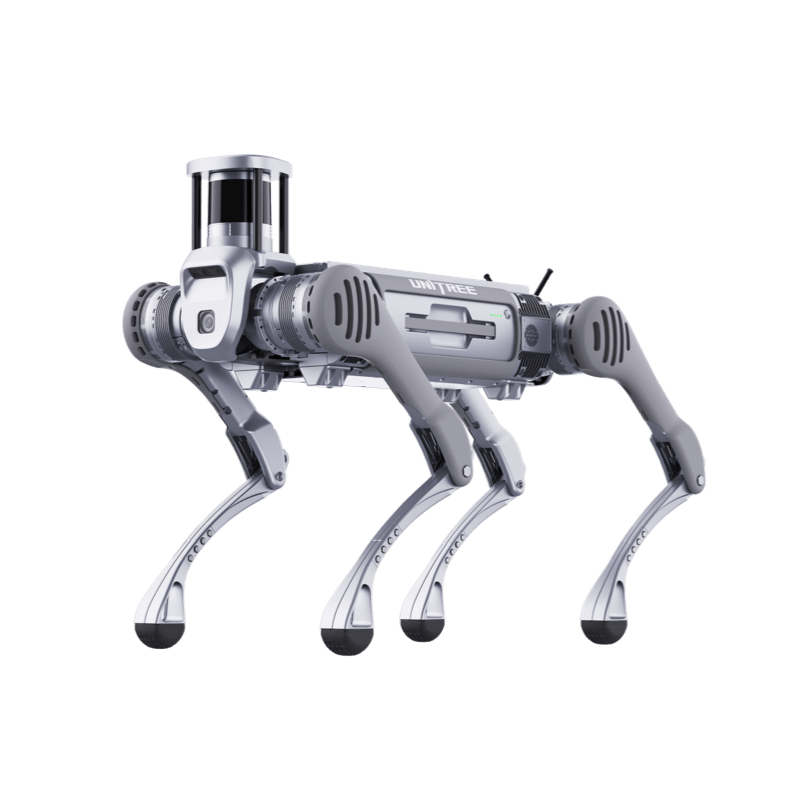
Адаптация к мобильным платформам
Разнообразные сценарии применения
-
Компактный и легкий
-
Ловкий и гибкий
-
Достаточная грузоподъемность
-
Высокая точность
-
Поддержка управления усилием в суставах
-
Защита от столкновений


-
ФУНКЦИИ
ПАРАМЕТРЫ
-
Люфт
~6 угл. минут
-
Протокол коммуникации
RS 485
-
Максимальный крутящий момент
33 Н·м
-
Разрешение энкодера
15 бит
-
Вес
405 г
-
Точность управления усилием
~0,2 Н·м
-
Габариты
Ф65 × 52 мм
-
Частота управления
1KHz
-
Редуктор
Гармонический редуктор
-
Подшипник
Промышленный перекрестно-роликовый
-
Передаточное отношение
60+
-
Обратная связь датчиков
Крутящий момент, угол, угловая скорость
-
Напряжение
24 V (рекомендуется)
-
Команды управления мотором
Крутящий момент, угол, угловая скорость, жесткость, демпфирование
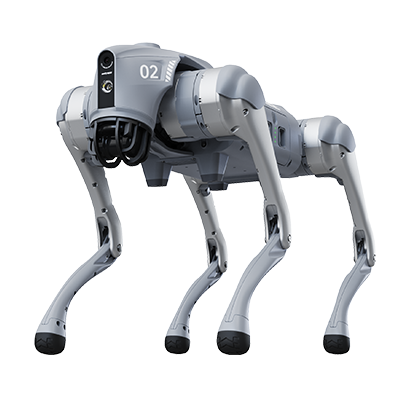
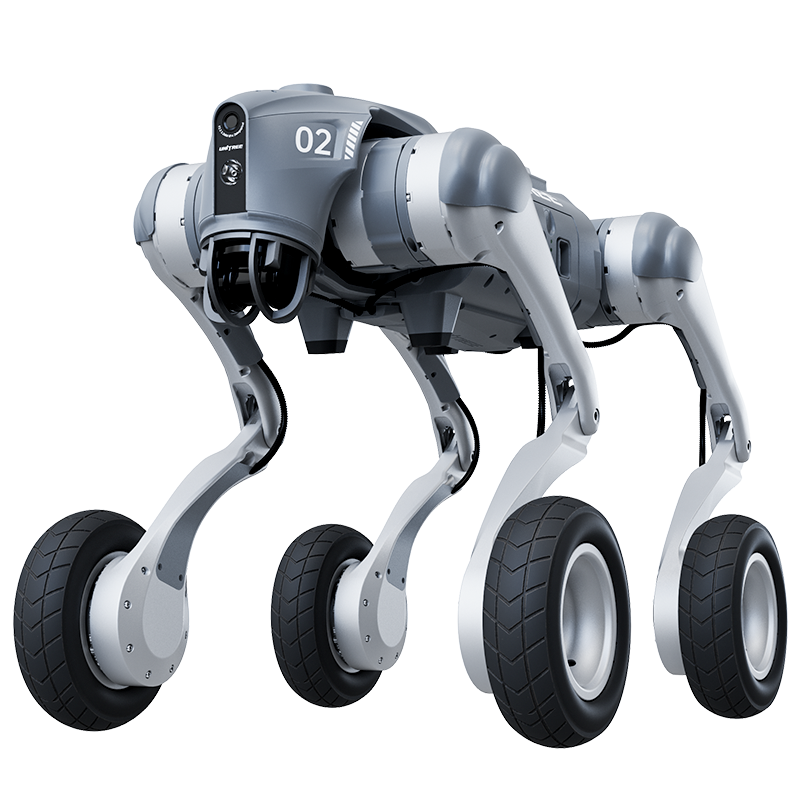
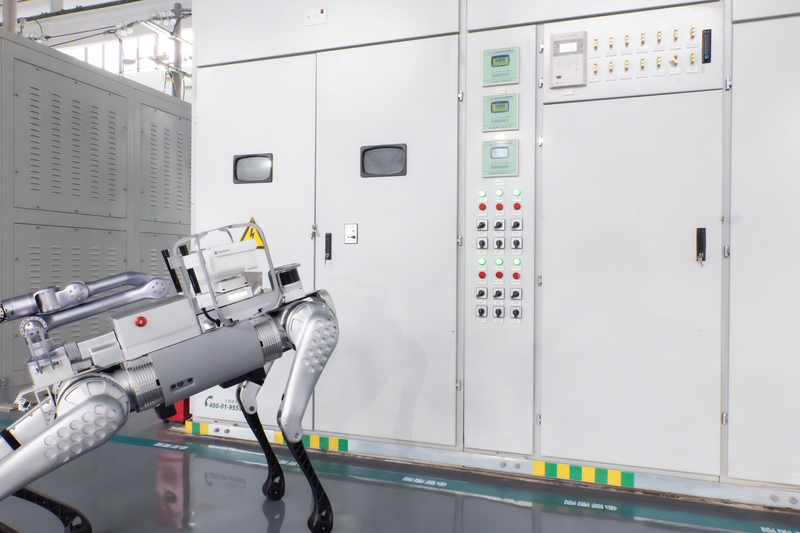
Работает совместно
с роботами Aliengo, B1
-
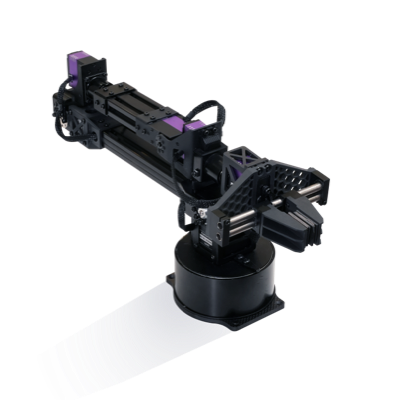
Модель
Z1 AIR
Z1 PRO
-
Степени свободы
6 осей
6 осей
-
Вес
4.3 кг
4.5 кг
-
Грузоподъемность
2 кг
≥3 кг
-
Радиус досягаемости
740 мм
740 мм
-
Повторяемость [1]
~0,1 мм
~0,1 мм
-
Питание
Напряжение 24 В, ток > 20 A
Напряжение 24 В, ток > 20 A
-
Интерфейс
Ethernet
Ethernet
-
ОС пользователя
Ubuntu
Ubuntu
-
Мощность
Макс. 500 Вт
Макс. 500 Вт
-
Обратная связь по усилию и защита от столкновений
Есть
Есть
-
Интерфейс управления [2]
Позиция + управление усилием
Позиция + управление усилием
Cустав
Диапазон
Максимальная скорость
Параметры суставов
-
J1
±150°
180°/с
-
J2
0-180°
180°/с
-
J3
-165°-0
180°/с
-
J4
±80°
180°/с
-
J5
±85°
180°/с
-
J6
±160°
180°/с
[1] Параметры зависят от фактических условий тестирования. Стандарты испытаний манипуляторов существенно различаются, поэтому точность может меняться при разных условиях.
[2] Из-за относительно низких передаточных чисел жесткость позиционного управления невысокая. При неоптимальной настройке управления возможны позиционные ошибки и колебания.
[3] Это гражданский робот. Не создавайте опасные модификации и не используйте устройство ненадлежащим образом.
[4] Пожалуйста, посетите сайт Unitree Robotics, чтобы ознакомиться с условиями и политиками и соблюдать местное законодательство.

