







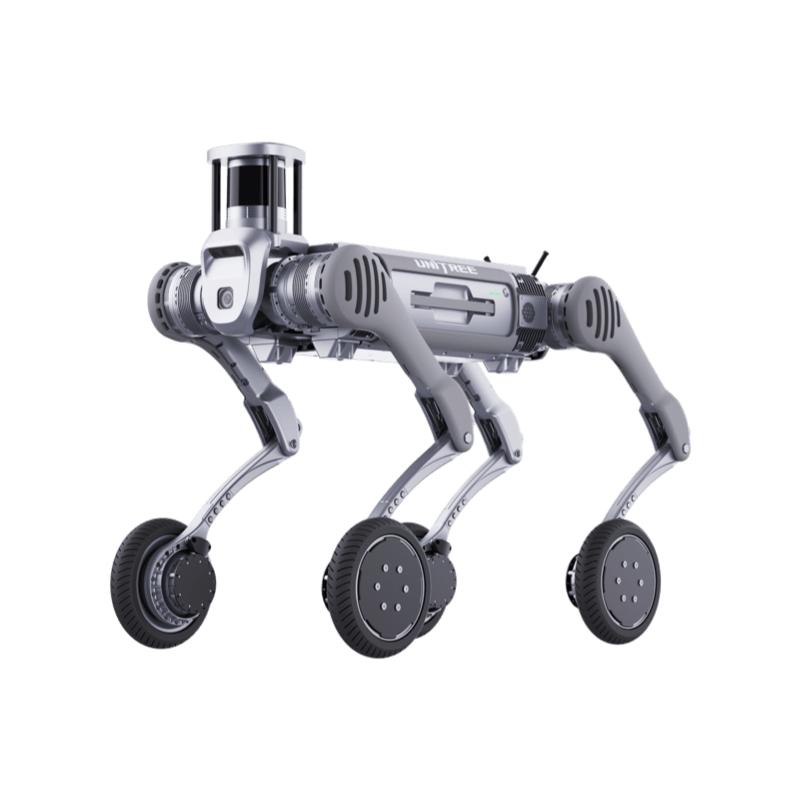











доминирует в игре
Благодаря уверенной походке и впечатляющей скорости, легко забивает голы в ситуациях «один на один».
unitree_rl_gym
Платформа обучения с подкреплением
Эффективная среда симуляции: Интеграция Isaac Gym и Mujoco для высокопроизводительного физического моделирования.
Гибкая настройка обучения: Настройка параметров через конфигурационные файлы (количество сред, начальное значение генератора случайных чисел, максимальное число итераций и др).
Полный цикл обучения: Поддержка процесса от Sim2Sim до развертывания на реальном роботе (Sim2Real).
RoboCup SDK
Руководство разработчика
API визуального распознавания: Встроенный алгоритм реального времени YOLO11, предоставляющий расширенную информацию о поле.
API пространственного позиционирования: Точное определение положения на поле на основе монокулярной геометрии и бинокулярной глубины.
API управления движением: Интерфейсы управления движением для системы принятия решений с учетом результатов визуального анализа, информации о поле и правил соревнований.

Высокоуровневый интерфейс управления.
Низкоуровневый интерфейс управления.
Интерфейс сервисов состояния.
DDS-интерфейс связи.
Интерфейс управления аудио и подсветкой.
Isaac Gym
Mujoco
Большая языковая модель UnifoLM
Поддержка TTS и ASR
Поддержка алгоритма распознавания YOLO
Быстрая настройка робота
и мониторинг состояния
Jetson Orin NX
Обеспечивает 100 TOPS вычислительной мощности ИИ
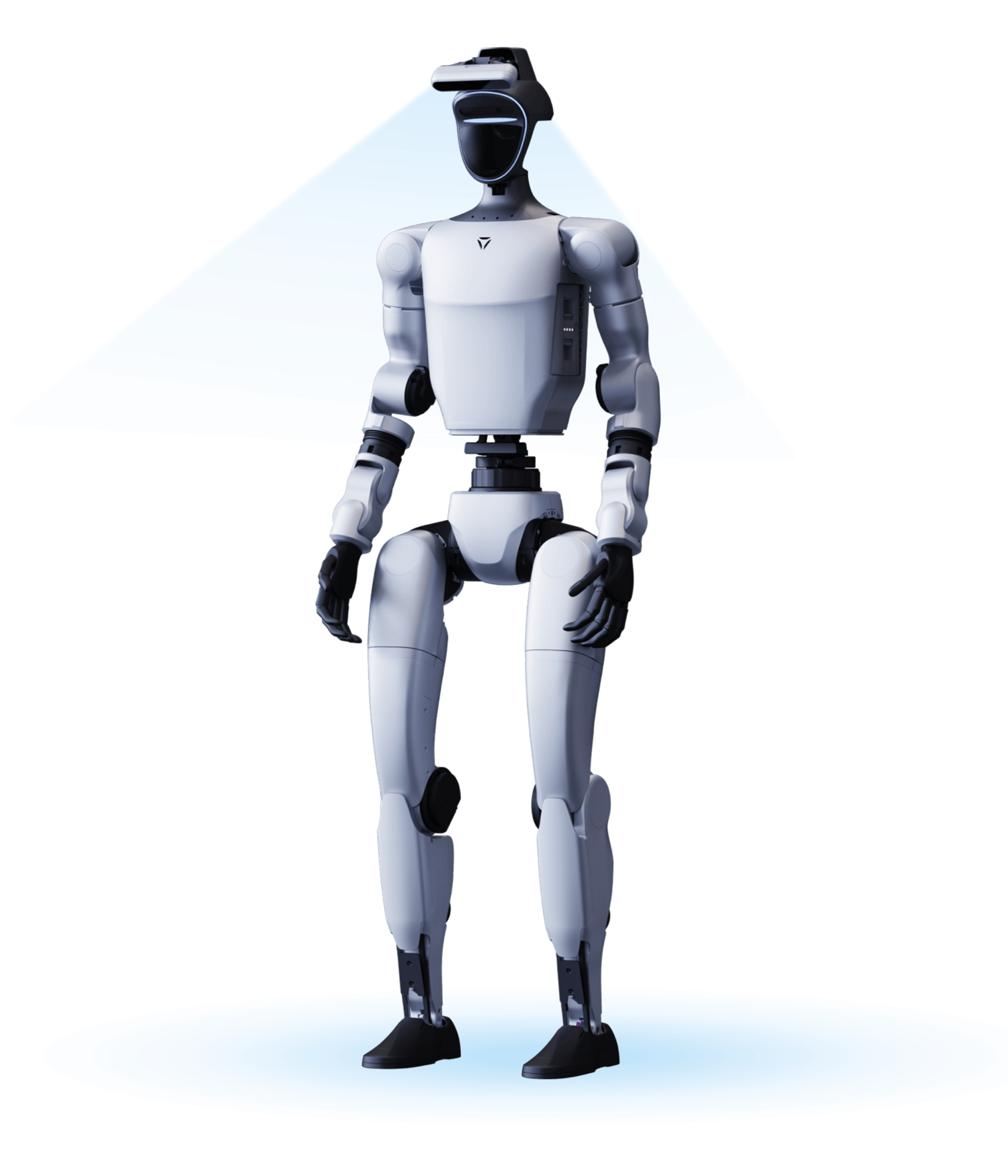
Вес — около 35 кг
Рост — около 130 см


7 (опционально управление по усилию для трехпалой кисти)
+2 (опционально 2 дополнительные степени свободы запястья)
*Параметры трехпалой кисти Dex3-1:
Большой палец — 3 активные степени свободы
Указательный палец — 2 активные степени свободы
Средний палец — 2 активные степени свободы
**Dex3-1 может быть дополнительно оснащена тактильными датчиками.
Сустав талии: Z ±155°、X ±45°、Y ±30°
Коленный сустав: 0 ~ 165°
Тазобедренный сустав: P ±154°、R −30° ~ +170°、Y ±158°
Сустав запястья: P ±92,5°、Y ±92,5°
[1]
Максимальный крутящий момент различных суставов отличается. Указано значение для самого мощного сустава.
[2]
Максимальная нагрузка на руку зависит от положения руки и степени ее вылета.
[3]
Подробная информация — в руководстве по вторичной разработке.
[4]
Параметры могут отличаться в зависимости от конфигурации и сценария использования.
[5]
Гуманоидный робот имеет сложную конструкцию и высокую мощность. Необходимо соблюдать безопасную дистанцию и использовать устройство с осторожностью.
[6]
Внешний вид продукта может быть изменен. Ориентируйтесь на фактическое изделие.
[7]
Некоторые функции находятся в стадии разработки и будут доступны позже.
[8]
Этот продукт является гражданским устройством. Пожалуйста, не выполняйте опасных модификаций и не используйте оборудование в потенциально опасных условиях.
[9]
Дополнительные условия и политики использования доступны на сайте Unitree Robotics. Пожалуйста, соблюдайте местное законодательство.
