Роботы
Роботы для образования
Промышленные роботы
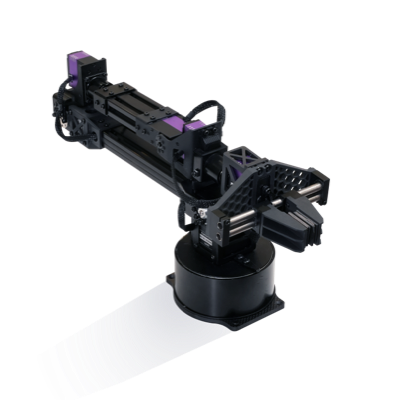
Роботизированные руки
Лидар
Компоненты
Гуманоиды
Роботы гуманоиды
G1 модификации
Ловкая рука
Индустрия
Сервис
Компания

Инженерное и IT-образование сегодня должно не только рассказывать о технологиях, но и давать возможность работать с ними «вживую». Студенты и школьники быстрее теряют интерес к сухой теории, если не видят, как алгоритмы и модели проявляются в действии. Учебным организациям нужны инструменты, которые позволяют перейти от презентаций к реальным системам — с датчиками, приводами, сложной кинематикой и программируемым поведением.
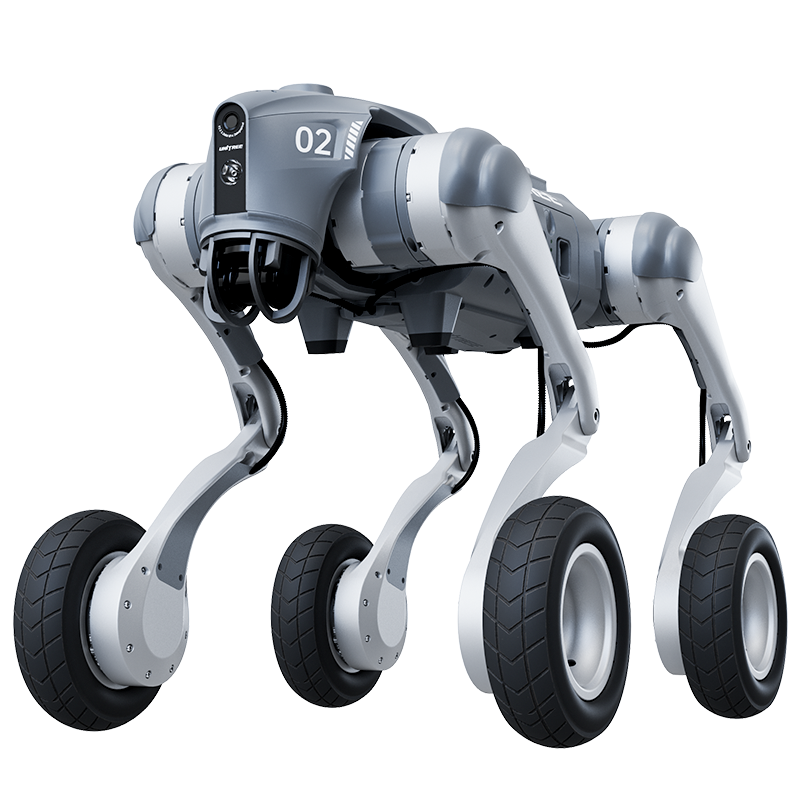
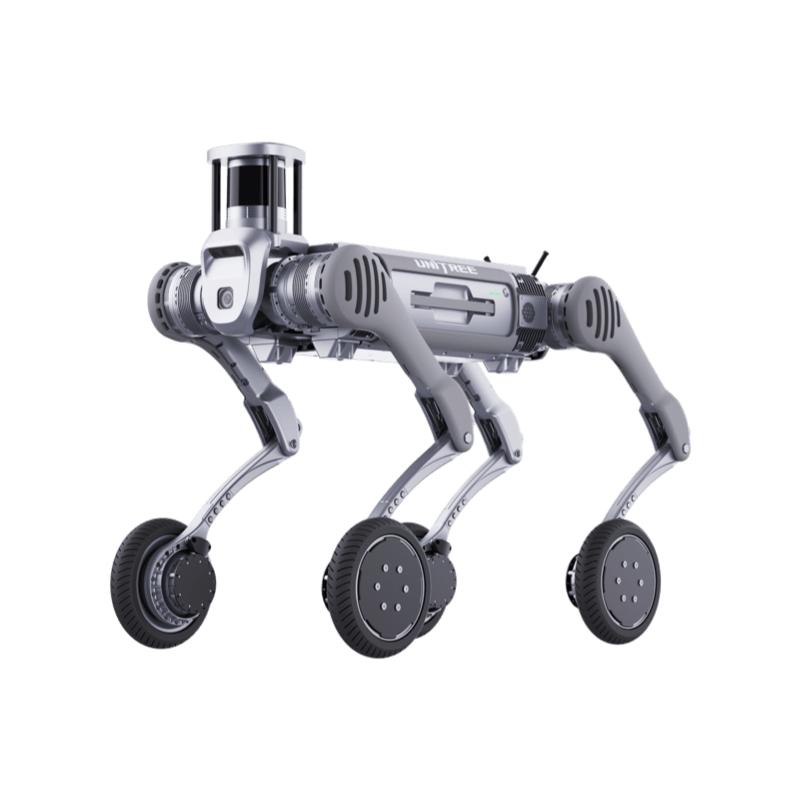
Гуманоидные и квадропедальные роботы Unitree как раз решают эту задачу. Гуманоиды позволяют изучать человекоподобное движение, жесты и взаимодействие с аудиторией, а мобильные четырёхногие платформы — устойчивое перемещение, баланс на неровной поверхности, автономную навигацию. На этих платформах преподаватели показывают основы робототехники, ИИ и управления движением, а учащиеся сразу закрепляют знания в практике — от первых скриптов до сложных проектных и исследовательских работ.
Роботы Unitree используются в самых разных форматах:
практические лабораторные работы по робототехнике и программированию;
курсы по кинематике, динамике, управлению движением, искусственному интеллекту и компьютерному зрению;
интерактивные образовательные проекты, выставки и фестивали науки;
студенческие и школьные проекты, хакатоны, инженерные и ИТ-олимпиады;
научно-исследовательские работы в университетах и совместные НИОКР с бизнесом.
Гуманоидные и квадропедальные платформы дополняют друг друга: на гуманоиде удобно разбирать антропоморфное поведение и взаимодействие с человеком, а на квадропеде — темы локомоции, устойчивости и автономного перемещения в пространстве.
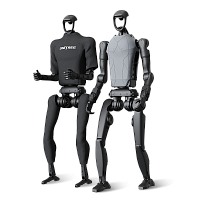
Организаторы фестивалей науки, выставок и выездных программ для школ и вузов нуждаются в «живом» робототехническом объекте, который одновременно удерживает внимание аудитории и показывает реальные технологии. В такого рода проектах часто используются сразу два типа платформ: гуманоидный робот Unitree G1 EDU в учебной конфигурации и квадропедальный робот в роли мобильного «исследователя».
Благодаря открытому SDK команда проекта разрабатывает собственные сценарии: гуманоид приветствует гостей, показывает жестами, куда пройти, участвует в мини-шоу, демонстрирует простые опыты. Квадропедальная платформа в это время выполняет свой маршрут, обходит препятствия, реагирует на метки или визуальные ориентиры. Для зрителя это наглядный пример того, как разные классы роботов решают свои задачи, опираясь на одни и те же принципы управления и ИИ. Школьники и студенты не просто смотрят шоу, а видят взаимосвязь между программным обеспечением, сенсорами и реальным поведением роботов.

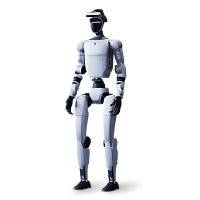
В техническом университете роботы Unitree становятся базой для целых образовательных программ. На примере гуманоидного робота, такого как Unitree H1, студенты изучают устройство антропоморфных систем: конструкцию, приводную систему, кинематические цепи, принципы шагания и баланса. Параллельно квадропедальные платформы используются для сравнения разных типов локомоции, алгоритмов стабилизации и планирования маршрута.
В лаборатории «шагающих роботов» студенты направлений «Информатика и вычислительная техника», «Мехатроника и робототехника» работают в среде на базе полноценной ОС (например, Linux), используют C/C++, Python, ROS и другие распространённые инструменты. Они пишут код, запускают его на реальных роботах, анализируют полученный результат и вносят изменения в алгоритмы. Та же инфраструктура применяется в НИОКР: на гуманоидных и квадропедальных платформах исследуются новые стратегии движения, взаимодействия с человеком, применения роботов в технологических процессах. Университет получает не демонстрационный комплект, а полноценную исследовательскую базу.
Формулировка «Full SDK access for innovation» в образовательном контексте означает, что преподаватели и студенты имеют полный доступ к программной части роботов. На платформах Unitree можно работать и с низкоуровневыми командами управления приводами, и с высокоуровневыми API для задания траекторий, состояний и поведенческих сценариев. Это позволяет выстроить непрерывную траекторию обучения: от простых скриптов, включающих и выключающих отдельные движения, до реализации собственных контроллеров равновесия и систем навигации.
Гуманоидные и квадропедальные роботы становятся носителями алгоритмов искусственного интеллекта. Студенты подключают модели распознавания объектов и жестов, используют данные с камер и других сенсоров, интегрируют роботов с системами компьютерного зрения и облачными сервисами. На одном курсе можно сосредоточиться на локомоции квадропеда, на другом — на человекоподобном взаимодействии гуманоидного робота с человеком, на третьем — на распределённых сценариях, где несколько роботов работают вместе. В результате формируются навыки, напрямую востребованные в индустрии: работа с сенсорными данными, системное проектирование, интеграция ИИ в киберфизические системы.
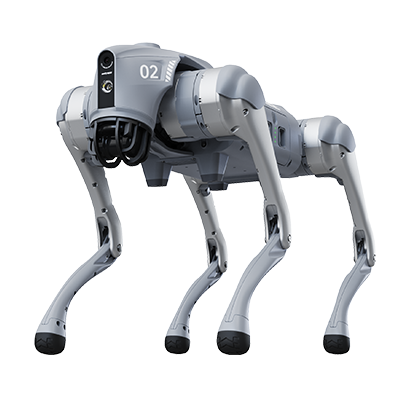
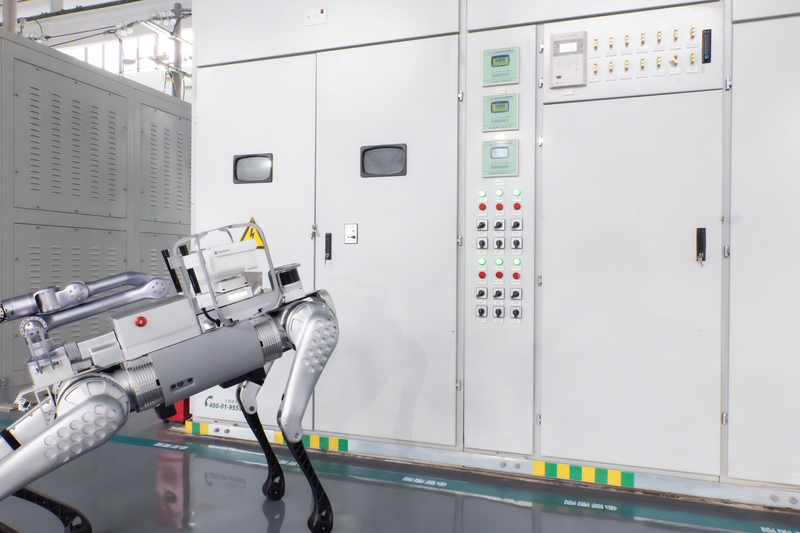
В школах, технопарках и детских техноцентрах чаще всего начинают именно с мобильных четырёхногих роботов: они наглядно демонстрируют принципы равновесия, реакции на препятствия и движения в пространстве. На уроках и внеурочных занятиях педагог показывает базовые сценарии, объясняет, как изменение параметров или логики влияет на движение. Постепенно учащиеся переходят к проектной деятельности: пробуют создавать собственные маршруты, добавляют простую логику принятия решений.
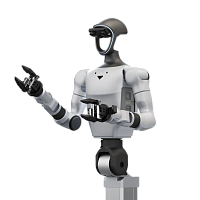
Гуманоидные платформы в таких пространствах используются как следующий уровень сложности и мотивации. Робот, который может пожать руку, показать жест, выполнить последовательность человекоподобных движений, сильно повышает интерес к инженерии и программированию. В технопарках и «кванториумах» гибридный парк — несколько квадропедов и один-два гуманоидных робота — позволяет строить линейку от первых демонстраций до серьёзных конкурсных и проектных работ, где команды уже формулируют задачи и отвечают за техническую реализацию.
Одно из ключевых преимуществ роботов Unitree — реалистичная механика, которая важна как для гуманоидных, так и для квадропедальных платформ. Множество степеней свободы, продуманная кинематика и алгоритмы стабилизации позволяют воспроизводить сложные движения и жесты. Это даёт богатый материал для лабораторных работ по кинематике, динамике и управлению: преподаватели могут показывать, как конкретные изменения в модели или алгоритме отражаются на движении реального робота.
Не менее важна программная часть. Полный доступ к SDK и поддержка распространённых языков и инструментов (например, C/C++, Python, ROS) упрощают интеграцию роботов в существующие курсы. Кафедры и образовательные центры могут использовать единую кодовую базу и симуляционные стенды, постепенно расширяя задания и перекладывая на студентов всё больше ответственности за алгоритмы. Возможность устанавливать руки, кисти, дополнительные сенсоры и вычислительные модули открывает путь к сложным сценариям: от манипуляции объектами до автономной навигации с использованием ИИ.
.jpg")
Роботы Unitree органично встраиваются в инфраструктуру образовательных организаций. Они могут быть подключены к лабораторным стендам, системам симуляции, цифровым платформам учёта и анализа результатов. Университеты и технопарки выстраивают единую методическую линию: одни и те же сценарии и репозитории кода используются в разных группах, курсах и даже партнёрских организациях. Это облегчает масштабирование программ и упрощает подготовку преподавателей и наставников.
Для интерактивных проектов важно, что одна и та же аппаратная база может работать и в «фронтовых» сценариях (шоу, презентации, фестивали), и в глубоко учебных и исследовательских: после мероприятия роботы возвращаются в лабораторию и используются в практических занятиях и НИОКР.
Использование гуманоидных и квадропедальных роботов Unitree даёт образовательной организации несколько конкретных преимуществ:
повышение привлекательности и конкурентоспособности программ за счёт работы с реальными высокотехнологичными платформами;
усиление практической составляющей обучения: теория сразу проверяется на реальных роботах;
возможность развивать собственные НИОКР и привлекать партнёров из бизнеса, предлагая им готовую экспериментальную базу;
формирование у школьников и студентов конкретных навыков, востребованных в индустрии: от программирования и работы с ИИ до системного мышления и командной работы;
рост вовлечённости и мотивации учащихся, для которых работа с реальными роботами становится сильным личным и профессиональным мотиватором.
Роботы Unitree позволяют выстроить непрерывную траекторию развития: от первой яркой демонстрации квадропедального робота на уроке или фестивале науки — до сложных университетских исследований на гуманоидных и мобильных платформах. Школы, технопарки и университеты могут строить общие программы и преемственные курсы, в которых учащиеся постепенно переходят от наблюдения к самостоятельной разработке.
Если вашей образовательной организации важно обновить содержание программ, усилить практику и сформировать вокруг себя сообщество мотивированных учащихся и партнёров, стоит рассмотреть использование как гуманоидных, так и квадропедальных роботов Unitree. Можно подобрать подходящие конфигурации и сценарии внедрения — от интерактивных мероприятий и школьных демонстраций до специализированных лабораторий робототехники и полноформатных НИОКР.