





















(без учета исполнительного устройства):

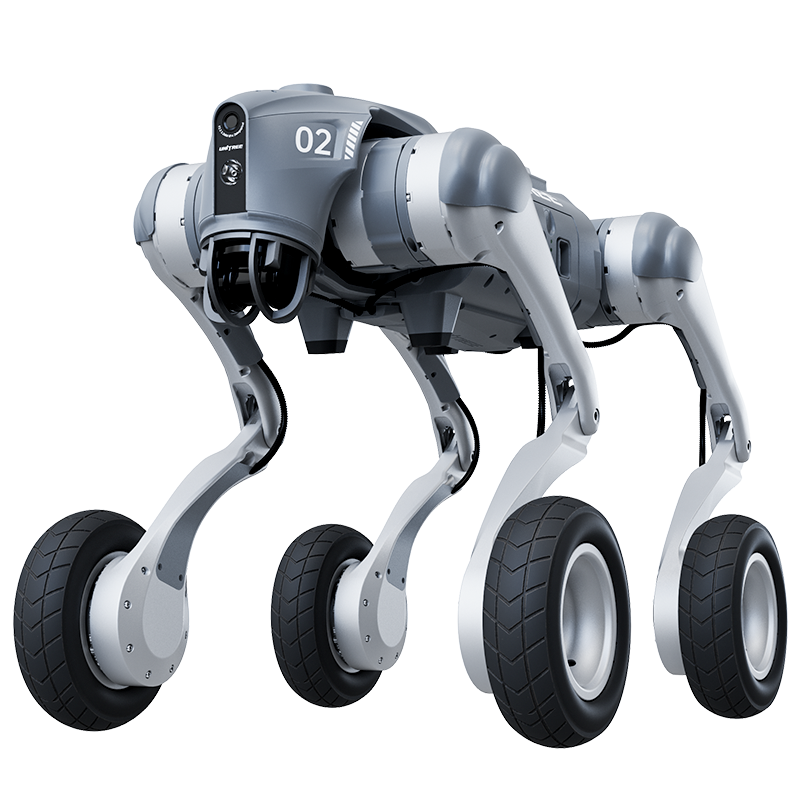
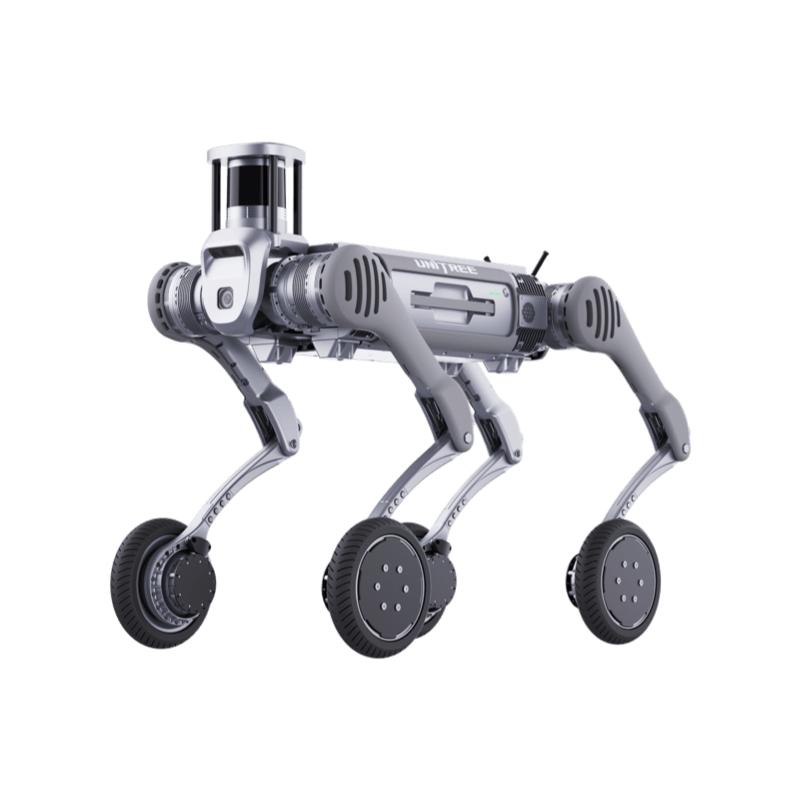
Мобильная конструкция с подъемным механизмом и колесной базой






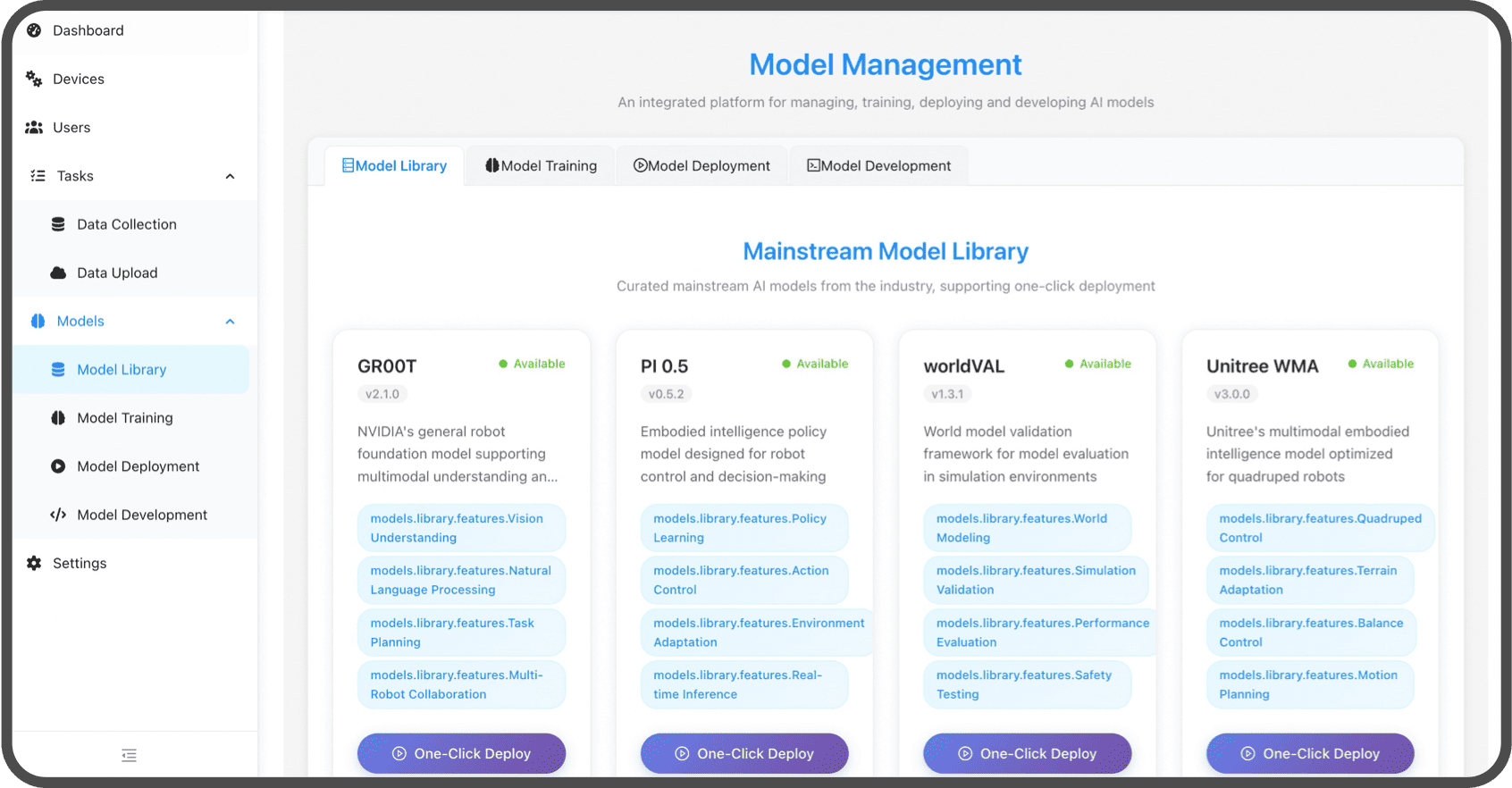
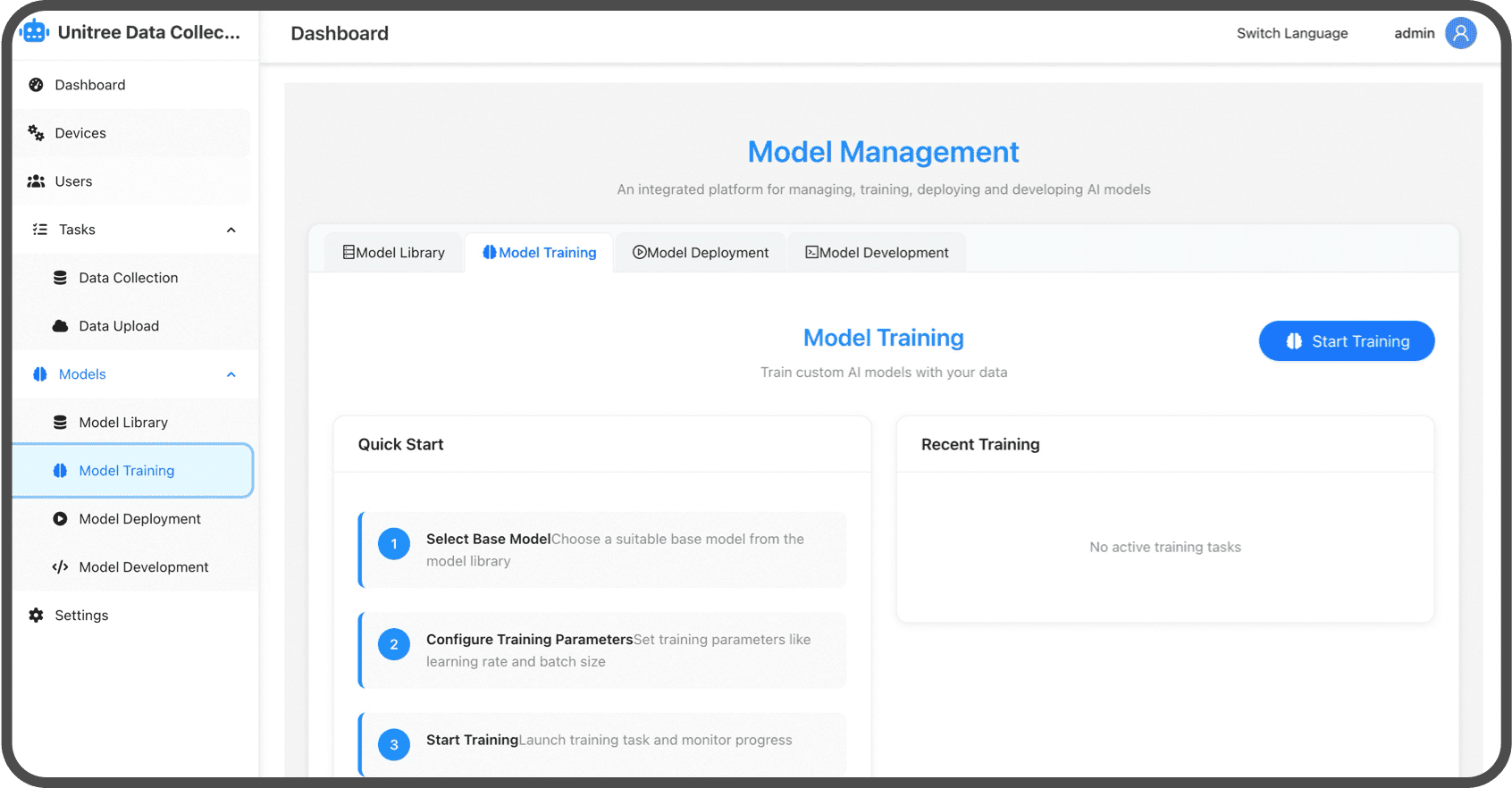




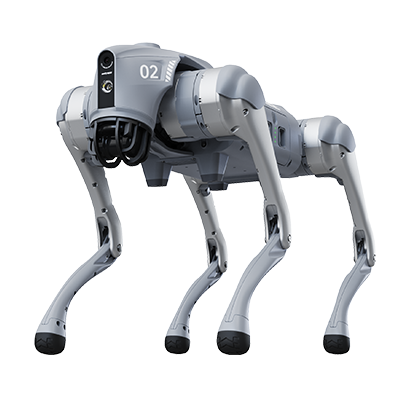
Режим принятия решений
Формирование действий на основе точного прогнозирования.
Режим симуляции
Высокоточная обратная связь для генерации данных.

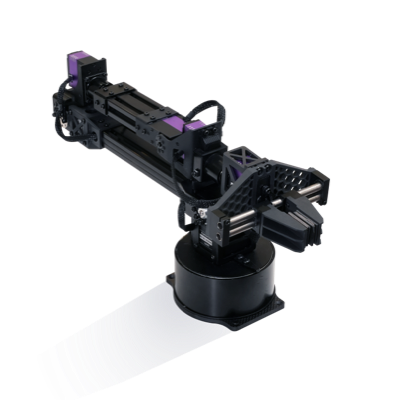
Двухпальцевый захват / Трехпалая кисть (без тактильных датчиков) /
Трехпалая кисть (с тактильными датчиками) / Пятипалая кисть
Двухпальцевый захват / Трехпалая кисть (без тактильных датчиков) /
Трехпалая кисть (с тактильными датчиками) / Пятипалая кисть
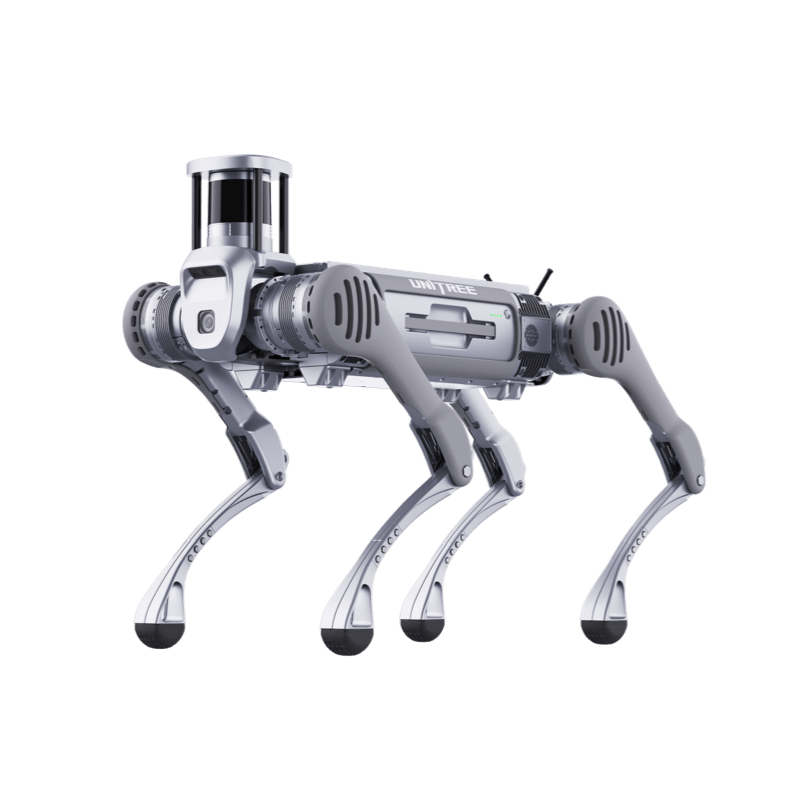
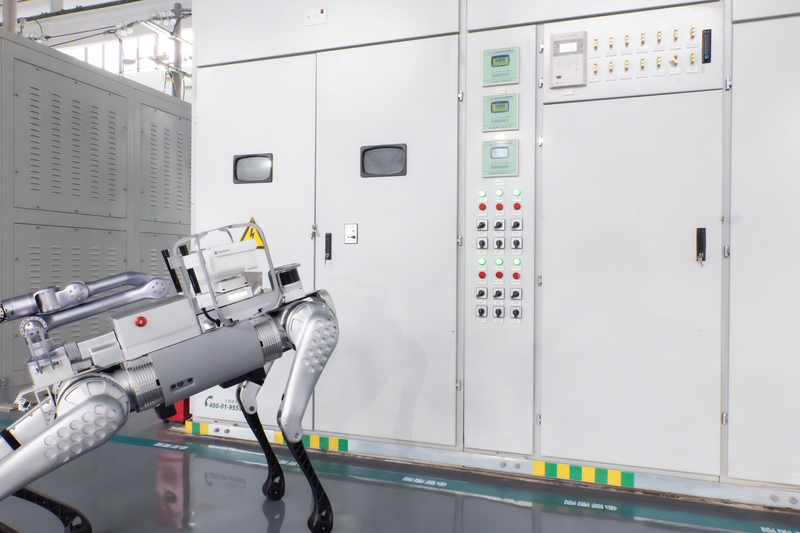
Лидар ×1 + Камера глубины ×2
+ Датчики столкновения ×2
+ Датчики обнаружения низких препятствий ×2
[1] Максимальная нагрузка зависит от конфигурации и положения руки.
[2] Для выбора исполнительного устройства обратитесь в отдел продаж.
[3] Подробности — в руководстве по вторичной разработке.
[4] Гарантийные условия — в гарантийной документации.
[5] Параметры могут отличаться в зависимости от конфигурации и условий эксплуатации.
[6] Робот имеет сложную конструкцию и высокую мощность. Необходимо соблюдать безопасную дистанцию и использовать устройство с осторожностью.
[7] Внешний вид продукта может быть изменен. Ориентируйтесь на фактическое изделие.
[8] Некоторые функции находятся в стадии разработки и будут доступны позже.
[9] Этот продукт является гражданским устройством. Пожалуйста, не выполняйте опасных модификаций и не используйте оборудование в потенциально опасных условиях.
[10] Дополнительные условия и политики использования доступны на сайте Unitree Robotics. Пожалуйста, соблюдайте местное законодательство.
