H1

H1-2
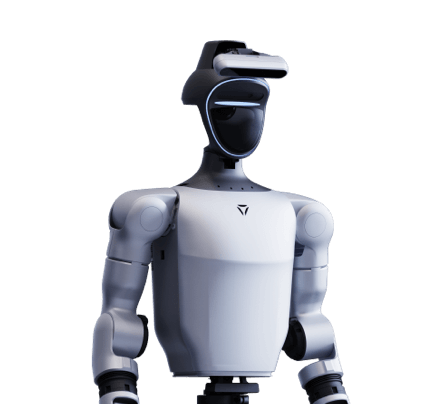
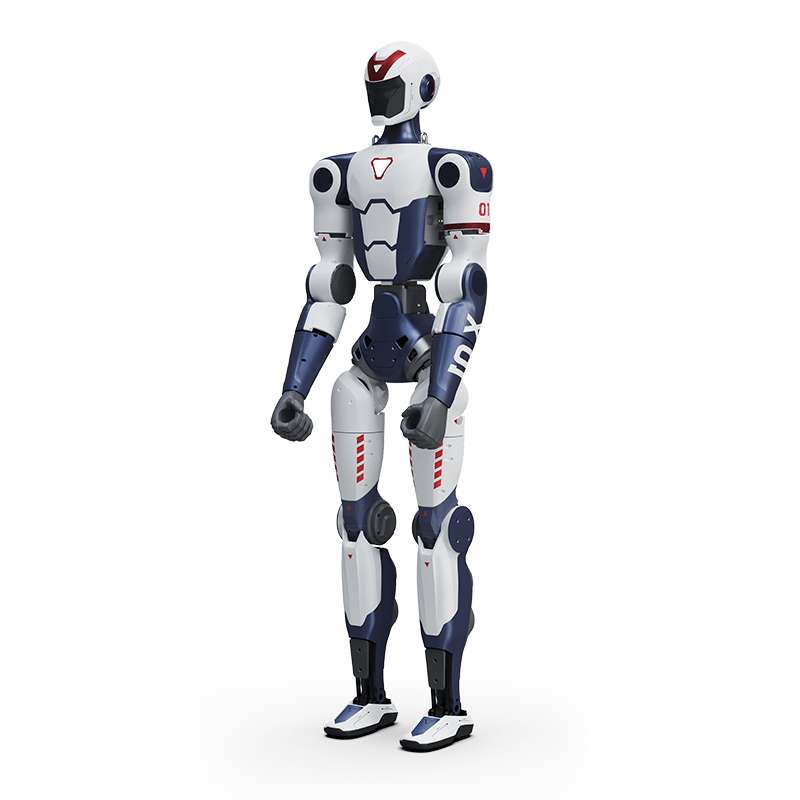
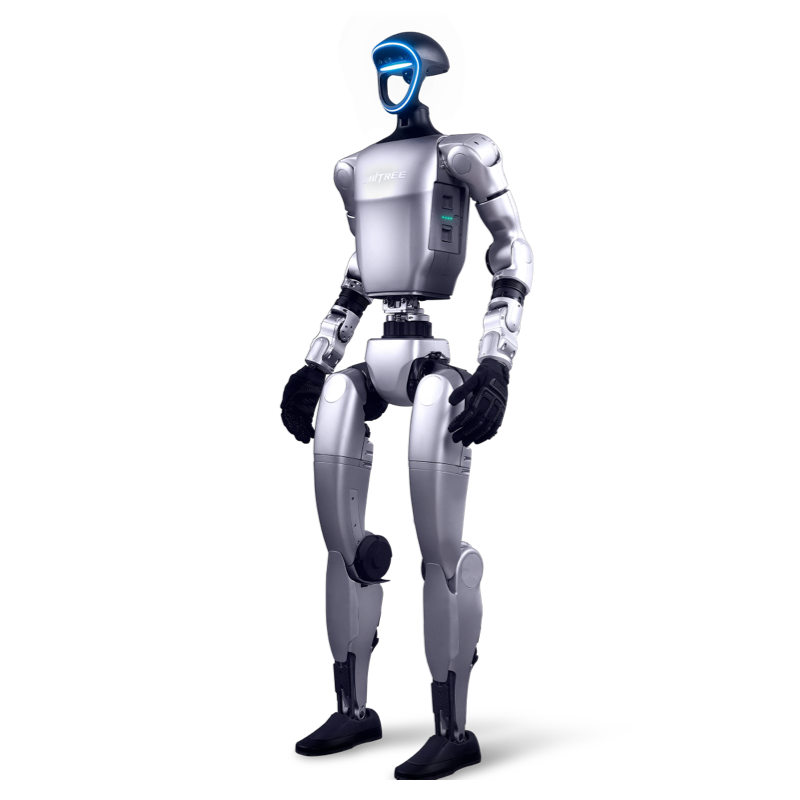
Основные размеры
(1520+285) мм × 570 мм × 220 мм
(1503+285) мм × 510 мм × 287 мм
Длина бедра и голени
400 мм × 2
400 мм × 2
Общая длина руки
338 мм × 2
685 мм
Степени свободы каждой ноги
5 (таз × 3 + колено × 1 + голеностоп × 1)
6 (таз × 3 + коленj × 1 + голеностоп × 2)
Степени свободы каждой руки
4 (с возможностью расширения)
7 (плечо × 3 + локоть × 1 + запястье × 3)
Общий вес
Около 47 кг
Около 70 кг
Выходной подшипник сустава
Промышленные перекрестно-роликовые подшипники (высокая точность, высокая грузоподъемность)
Промышленные перекрестно-роликовые подшипники (высокая точность, высокая грузоподъемность)
Основной суставной двигатель
Низкоинерционные высокоскоростные СДПМ (PMSM) с внутренним ротором (синхронный двигатель с постоянными магнитами, улучшенная скорость отклика и теплоотвод)
Низкоинерционные высокоскоростные СДПМ (PMSM) с внутренним ротором (синхронный двигатель с постоянными магнитами, улучшенная скорость отклика и теплоотвод)
Предельный крутящий момент суставного узла
Крутящий момент коленного сустава около 360 Н·м, крутящий момент тазобедренного сустава около 220 Н·м, крутящий момент голеностопного сустава около 59 Н·м, крутящий момент сустава руки около 75 Н·м
Крутящий момент коленного сустава около 360 Н·м, крутящий момент тазобедренного сустава около 220 Н·м, крутящий момент поясничного сустава около 220 Н·м, крутящий момент голеностопного сустава около 75×2 Н·м
Подвижность
Скорость движения 3,3 м/с (мировой рекорд),
Потенциальная скорость > 5 м/с
Скорость движения < 2 м/с
Аккумулятор
Емкость аккумулятора 15 А·ч (0,864 кВт·ч), максимально напряжение 67,2 В
Емкость аккумулятора 15 А·ч (0,864 кВт·ч), максимально напряжение 67,2 В
Вычислительная мощность управления и восприятия
Стандартная конфигурация: Intel Core i5 (функции платформы), Intel Core i7 (для пользовательских разработок)
Опционально: Intel Core i7 или Nvidia Jetson Orin NX
Стандартная конфигурация: Intel Core i5 (функции платформы), Intel Core i7 (для пользовательских разработок)
Опционально: Intel Core i7 или Nvidia Jetson Orin NX (до трех модулей)
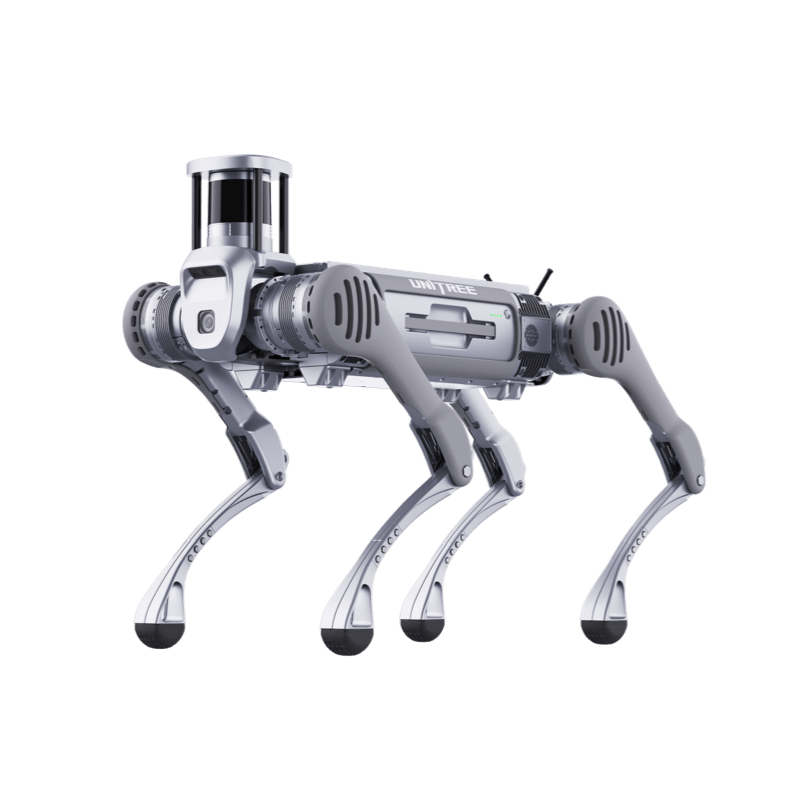
Конфигурация датчиков
3D-лидар и камера глубины
3D-лидар и камера глубины
Ловкая кисть
Опционально
Опционально: Dex5-1 или другие амбидекстрные кисти
Характеристики суставов руки
(пиковый крутящий момент)
/
Плечо: около 120 Н·м, локоть: около 120 Н·м
Запястье: около 30 Н·м
Нормальная нагрузка на руку
/
Пиковая: около 21 кг; номинальная: около 7 кг
* Примечание: продукт продолжает совершенствоваться и оптимизироваться. Окончательные характеристики определяются фактически поставленным изделием.
* Внешний вид поставляемой версии может отличаться от версии, представленной на официальном сайте. Если для вас важны детали внешнего вида, пожалуйста, свяжитесь с отделом продаж до покупки.
* Между различными версиями продукции существуют различия в параметрах. Выбирайте конфигурацию в соответствии со своими задачами.
* В настоящее время мировая индустрия гуманоидных роботов находится на ранней стадии развития. Индивидуальным пользователям настоятельно рекомендуется тщательно ознакомиться с ограничениями гуманоидных роботов перед покупкой.
* Этот продукт является гражданским роботом. Пожалуйста, не создавайте опасные модификации и не используйте устройство в потенциально опасных условиях.
* Для ознакомления с дополнительными условиями и политиками посетите сайт Unitree Robotics и соблюдайте местное законодательство.