


















Unitree Dex1-1






Научные исследования и образование

Сортировка посылок

Промышленная автоматизация
Новый ритейл

Потребительская электроника
Медицина
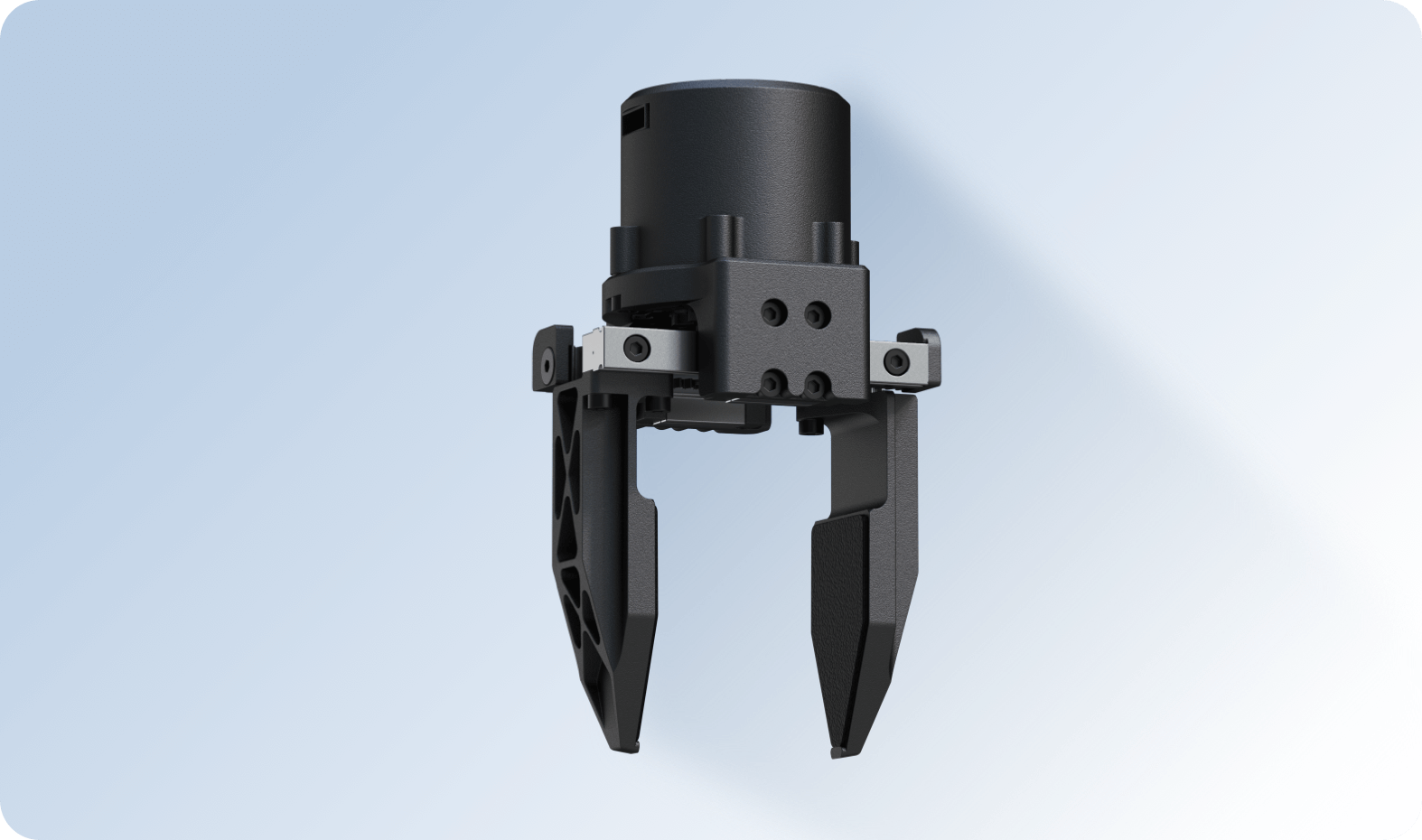
Камера на захвате

Камера глубины (D405)

RGB-камера
(поле обзора 160°)

Коммуникационный адаптер (плата преобразования 485 → USB)

[1]
Ширина захвата составляет 78 мм в полуоткрытом положении. 120 мм — в полностью открытом положении. 124,5 мм — в полностью закрытом положении (с выдвинутыми боковыми направляющими).
[2]
Указанные значения скорости, силы захвата и времени закрытия измерены при различных условиях (24–60 В) с регулировкой жесткости, демпфирования и крутящего момента двигателя. Фактические значения могут отличаться в зависимости от условий применения.
[3]
Грузоподъемность при формообразующем захвате — максимальная горизонтальная нагрузка, которую захват может удерживать без потери сцепления. Значение зависит от условий эксплуатации.
[4]
Грузоподъемность при фрикционном захвате — максимальная вертикальная нагрузка без проскальзывания (измерено на квадратном стальном блоке). Значение зависит от условий эксплуатации.
[5]
Все параметры могут отличаться в зависимости от сценария применения или конфигурации модели.
[6]
Внешний вид продукта может быть изменен. Ориентируйтесь на фактический образец.
[7]
Этот продукт является гражданским устройством. Пожалуйста, не выполняйте опасных модификаций и не используйте оборудование в потенциально опасных условиях.
[8]
Дополнительные условия и политики использования доступны на сайте Unitree Robotics. Пожалуйста, соблюдайте местное законодательство.
