Роботы
Роботы для образования
Промышленные роботы
Роботизированные руки
Лидар
Компоненты
Гуманоиды
Роботы гуманоиды
G1 модификации
Ловкая рука
Индустрия
Сервис
Компания
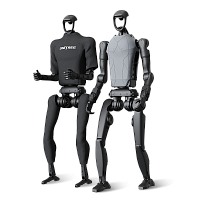
Если выбирать H1 или G1, то главный вывод такой: Unitree G1 и H1 — это две модели с разным масштабом и разной логикой применения. G1 обычно разумнее рассматривать как более компактную и сравнительно доступную платформу для обучения, исследований, демонстраций и первых пилотных проектов. H1 — это более крупный гуманоид с иным уровнем позиционирования, который уместнее там, где важны полноразмерный форм-фактор, более серьезная динамика движения и работа с задачами, ближе к человеческой среде. Поэтому выбирать стоит не по принципу «какой лучше вообще», а по сценарию, бюджету и требованиям к проекту.
Важный нюанс: публичные материалы Unitree по H1 и более поздним вариантам платформы частично пересекаются, поэтому сравнивать модели нужно осторожно — без смешения разных конфигураций в один условный набор характеристик. Для практического выбора полезнее смотреть не только на эффектные видео, но и на размер, доступность версий для разработки, сенсорный стек, автономность и стоимость входа в проект.
G1 — это прежде всего компактная точка входа в гуманоидную робототехнику. Он лучше подходит для лабораторий, вузов, демонстраций и команд, которые хотят начать с более управляемого по бюджету формата.
H1 — это полноразмерная платформа другого класса. Она логичнее там, где нужен человеческий масштаб, более заметная динамика и более амбициозный исследовательский контур.
Разница между моделями не сводится к «младшей» и «старшей». Они рассчитаны на разные типы задач, команд и ожиданий от проекта.
Для разработки особенно важно различать розничные и developer-версии. В случае G1 это критично, потому что Unitree G1 EDU ориентирован именно на вторичную разработку.
Выбор должен идти от сценария. Для обучения и пилотных проектов чаще логичнее G1, для полноразмерных экспериментов и более серьезной динамики — H1.
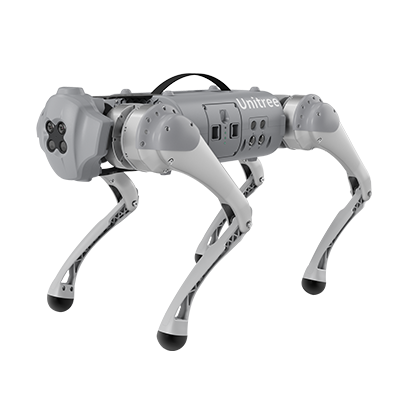
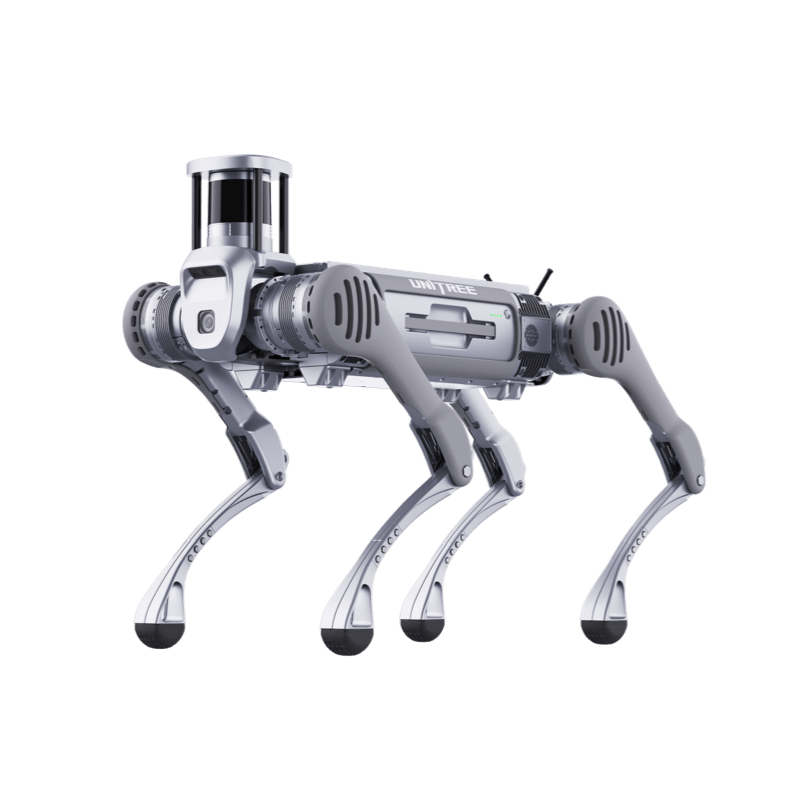
Опыт с робопсами важен еще и потому, что в таких системах давно отрабатываются вещи, без которых не получится и хороший гуманоидный робот: удержание баланса, работа в движении, реакция на изменения поверхности, компактные силовые узлы и высокая частота управления. Когда компания переходит от четырех ног к двум, она не начинает с нуля — она переносит наработки в более сложную форму.
Для рынка это означает следующее:
G1 и H1 выросли из инженерной практики, а не только из маркетингового интереса к человекоподобным машинам.
В обеих платформах чувствуется акцент на подвижность, приводную базу и динамический контроль.
Стратегия Unitree во многом строится на том, чтобы сделать гуманоидов не только эффектными, но и пригодными для реальной разработки.
На уровне базового сравнения различия видны сразу. Unitree G1 заметно компактнее и легче. H1 — более крупная полноразмерная платформа. Уже этого достаточно, чтобы понять: модели ориентированы на разные условия использования.
Ниже — упрощенное сравнение по основным публично заявленным параметрам.
|
Параметр |
Unitree G1 |
Unitree H1 |
|
Рост |
132 см |
Около 180 см |
|
Масса |
Около 35 кг |
Около 47 кг |
|
Форм-фактор |
Компактный гуманоид |
Полноразмерный гуманоид |
|
Степени свободы |
23, у расширенных версий больше |
Конфигурация зависит от версии и поколения |
|
Сенсоры |
Глубинная камера, 3D-лидар |
Глубинная камера, 3D-лидар |
|
Автономность |
Около 2 часов |
Зависит от сценария и конфигурации |
|
Вычислительная платформа |
Базовая версия проще, EDU — с расширением под разработку |
Более серьезное позиционирование под вычисления и разработку |
|
Позиционирование |
Обучение, R&D, демонстрации, пилоты |
Полноразмерные исследования, динамика, расширенные сценарии |
|
Цена |
Ниже порог входа |
Выше порог входа |
Практически это означает простую вещь: G1 проще вписать в учебную или лабораторную среду, где важны компактность и контроль бюджета. H1 интереснее, когда сам размер платформы уже является частью задачи.
Разница в габаритах влияет не только на внешний вид, но и на весь контекст использования. G1 легче перевозить, хранить, демонстрировать на мероприятиях и запускать в помещениях, где нет большого запаса по пространству. Это делает его удобным для тех, кто только начинает работать с гуманоидной платформой.
H1, напротив, ближе к человеческому масштабу. Это важно в сценариях, где исследуется взаимодействие с окружающей средой, изначально созданной под человека: проходы, двери, рабочие зоны, высота объектов, позиционирование относительно мебели и оборудования. Чем ближе корпус к человеческим пропорциям, тем логичнее он выглядит для ряда прикладных экспериментов.
Отдельно стоит учитывать конфигурации рук и верхней части корпуса. Для реального выбора важно смотреть не на абстрактное название модели, а на конкретную комплектацию: именно она определяет, насколько система подходит для манипуляций, телеприсутствия или исследовательской работы.
В теме движения H1 обычно воспринимается как более мощная полноразмерная платформа, а G1 — как компактная и очень подвижная машина. На практике это означает, что H1 интересен тем, кому важно полноразмерное двуногое движение и запас под более серьезные эксперименты с походкой, балансом и динамикой.
G1, в свою очередь, делает ставку на сочетание компактности и выразительной моторики. Для учебных и демонстрационных задач это часто даже удобнее: меньше масса, проще площадка, ниже требования к логистике и обычно легче организовать безопасное взаимодействие.
Что это дает в реальных сценариях:
Для полноразмерных исследований движения логичнее смотреть на H1.
Для первых лабораторных проектов, демонстраций и обучающих сценариев часто рациональнее G1.
Для публичных показов и визуально впечатляющих демонстраций обе модели интересны, но эффект от H1 сильнее связан с человеческим масштабом, а у G1 — с компактной динамикой.
С точки зрения восприятия обе платформы строятся по схожей логике: сенсоры глубины, 3D-лидар, системы стабилизации и вычислительная часть, которая помогает машине понимать пространство, держать баланс и корректно двигаться. Для неспециалиста это можно объяснить так: робот должен не просто идти, а постоянно «видеть» вокруг себя структуру пространства и пересчитывать движение в реальном времени.
Роль ИИ здесь не в том, чтобы превратить машину в «разумного человека», а в том, чтобы улучшать распознавание среды, адаптацию, перенос навыков из симуляции в реальный мир и отработку сложных двигательных паттернов. Это особенно важно для разработчиков, которые используют платформы как базу для RL, imitation learning и телеметрии.
Если говорить проще, сенсоры отвечают за то, чтобы робот понимал обстановку, а ИИ и управляющий стек — за то, чтобы он вел себя в этой обстановке не хаотично, а устойчиво и предсказуемо.
Тема бокового сальто G1 получила большой резонанс, потому что такие движения зрелищно показывают уровень контроля тела, качество приводов, баланс и скорость реакции системы. Для широкой аудитории это наглядный знак того, что перед ней не просто двуногий макет, а действительно динамическая машина.
Но важно не переоценивать это достижение. Одна эффектная функция не делает платформу автоматически лучшим выбором для любого проекта. Акробатика показывает высокий уровень моторного контроля, но не отвечает на вопросы о цене владения, удобстве разработки, надежности в повторяемых сценариях и применимости к конкретной задаче бизнеса или лаборатории.
Поэтому относиться к таким демонстрациям лучше как к маркеру инженерного уровня, а не как к универсальному аргументу покупать именно эту модель.
По доступным данным, обе платформы разумнее всего рассматривать для таких сценариев:
исследования,
образование,
демонстрации,
тестирование алгоритмов,
робототехнические лаборатории,
пилотные прикладные проекты.
Это важно подчеркнуть, потому что рынок гуманоидов все еще находится на ранней стадии. Ни G1, ни H1 не стоит подавать как полностью готовых «универсальных сотрудников» для любой среды. Намного точнее говорить о них как о платформах для исследований, обучения, тестов и ограниченных прикладных сценариев.
Робот Unitree G1 особенно хорошо вписывается в сценарии, где нужен понятный вход в тему: университетская лаборатория, технологическая выставка, учебный центр, пилотный проект по embodied AI. H1 интереснее там, где требуется полноразмерный гуманоид для более серьезных исследований динамики, восприятия и взаимодействия со средой.
По теме манипуляций различия особенно зависят от комплектации. У G1 есть конфигурации, где работа с предметами и более точное управление руками вынесены как важная часть платформы. Это делает его интересным для задач, связанных с обучением манипуляциям, телеприсутствием, тестированием хватов и взаимодействием с несложными объектами.
У H1 важно уточнять конкретную версию и набор исполнительных элементов. В ряде случаев речь идет не просто о руках как у человека, а о разных уровнях возможностей верхней части тела в зависимости от поколения и конфигурации.
Практический вывод здесь такой:
Для первых экспериментов с манипуляцией и взаимодействием с предметами лучше внимательно смотреть на developer-версию G1.
Для более масштабных исследований, где важен человеческий рост и общий форм-фактор, H1 может быть интереснее.
В обоих случаях нельзя оценивать манипуляционные возможности только по промо-роликам — нужно уточнять именно комплектацию.
Автономность — один из самых недооцененных критериев выбора. На практике именно она часто определяет, насколько удобно использовать платформу в учебном процессе, на выставке, в лаборатории или в пилотном проекте.
Для G1 логика проще: его обычно легче планировать под короткие демонстрации, тестовые сессии и исследовательские циклы. У более крупной платформы вроде H1 вопрос времени работы теснее связан с режимом нагрузки, конфигурацией и эксплуатационным сценарием.
При выборе стоит учитывать:
длительность одного рабочего сеанса,
наличие сменных батарей и удобство обслуживания,
насколько часто робот будет работать в динамическом режиме,
будет ли это выставочный сценарий, лабораторный стенд или исследовательская платформа с частыми перезапусками.
Искусственный интеллект в случае G1 и H1 важен не сам по себе, а как часть полного цикла разработки. Современная гуманоидная платформа ценна тем, что позволяет собирать данные, обучать модели в симуляции, переносить их на реальную машину, корректировать поведение и повторять цикл снова.
Для робототехнических команд это означает, что можно:
тестировать обучение с подкреплением,
работать с имитационным обучением,
использовать телеметрию и симуляцию,
постепенно переносить навыки из виртуальной среды в физическую.
Именно поэтому разница между моделями для разработчика — это не только размер корпуса, но и удобство как исследовательского инструмента. Если команде нужна более доступная платформа для старта и экспериментов, G1 часто выглядит практичнее. Если проекту нужен более крупный носитель для полноразмерных сценариев, логичнее смотреть на H1.
С точки зрения цены и доступности различия между моделями заметные. G1 выглядит как более доступный вход в гуманоидную робототехнику, особенно если сравнивать его с полноразмерными платформами. При этом важно понимать, что цена зависит от конфигурации, региона, способа поставки, налогов и версии.
Для G1 есть более понятная логика розничного и developer-позиционирования. В этом контексте Unitree G1 EDU важен отдельно: это версия для тех, кому недостаточно просто купить и включить, а нужна вторичная разработка, доступ к экспериментам и более глубокая интеграция в R&D.
С H1 ситуация обычно сложнее. Платформа позиционируется выше, а публичные цены и коммерческие условия могут отличаться по конфигурациям и каналам продаж. Поэтому здесь особенно важно не воспринимать любую опубликованную цифру как абсолютную константу.
Отдельно стоит упомянуть формулировку робот Unitree H1 2 Basic. Ее корректнее воспринимать как техническое или конфигурационное обозначение внутри семейства платформы, а не как полностью отдельную массовую модель с простой розничной логикой выбора. Для закупки это означает одно: всегда уточнять поколение, комплектацию и набор функций до принятия решения.
G1 чаще подходит следующим категориям пользователей:
Исследовательские команды, которым нужен доступный вход в embodied AI.
Учебные заведения и университетские лаборатории.
Компании, тестирующие гуманоидную робототехнику в пилотном формате.
Тем, кому важны демонстрационные возможности при разумном бюджете.
Командам, которым нужен баланс цены и возможностей.
H1 чаще подходит таким пользователям:
Интеграторы и лаборатории, которым нужен полноразмерный гуманоид.
Команды, исследующие движение и взаимодействие в человеческом масштабе.
Проекты, где сама геометрия полноразмерного тела уже критична.
Те, кому важна более амбициозная исследовательская платформа, а не только компактность.
Если формулировать совсем кратко, то H1 и G1 различаются прежде всего уровнем масштаба задачи. G1 — чаще про старт, гибкость и доступность. H1 — чаще про полноразмерный класс и более серьезные требования к проекту.
Сравнивать G1 и H1 с другими известными гуманоидами можно только осторожно. Например, Boston Dynamics Atlas обычно воспринимается как промышленно ориентированная платформа более высокого уровня зрелости. Tesla Optimus — это очень заметный проект, но его публичное позиционирование и открытость данных для сравнения устроены иначе. Astribot S1 интересен как платформа, где большой акцент сделан на манипуляцию, взаимодействие и developer-стек.
Честное сравнение здесь возможно только по нескольким критериям:
позиционирование,
публичная доступность,
характер демонстраций,
открытость параметров,
класс задач.
Если говорить в этом формате, то G1 и H1 интересны прежде всего тем, что бренд Unitree показывает сравнительно понятный переход от динамической мобильной робототехники к гуманоидным платформам с практической ценностью для лабораторий, разработчиков и ранних пилотов.
Если отвечать на вопрос H1 или G1 максимально прикладным образом, то логика выбора выглядит так. Берите G1, если вам нужен более компактный, сравнительно доступный и понятный вход в гуманоидную робототехнику — для обучения, исследований, демонстраций и первых пилотных задач. Смотрите в сторону H1, если вам нужна полноразмерная платформа с другим масштабом, более серьезной динамикой и акцентом на задачи, где важен человеческий форм-фактор.
Иначе говоря, нет универсального ответа на вопрос «что лучше». Для части команд оптимальным выбором станет Unitree G1, потому что он дает более низкий порог входа и удобнее как стартовая платформа. Для других логичнее Unitree Robotics H1, потому что проект требует полноразмерного корпуса и другого класса исследований. Именно сценарий должен определять выбор, а не эффектность отдельных роликов.
1. Что может делать робот Unitree G1?
Он умеет ходить, удерживать равновесие, использовать сенсоры для восприятия пространства, участвовать в демонстрациях, работать как исследовательская и учебная платформа, а в расширенных конфигурациях — выполнять задачи, связанные с манипуляцией и взаимодействием с объектами.
2. В чем основные отличия Unitree G1 от Unitree H1?
Главные различия — размер, масса, позиционирование и сценарии применения. G1 компактнее и чаще подходит для обучения, лабораторий и пилотных проектов. H1 крупнее и логичнее для полноразмерных исследований и более серьезных экспериментов с движением.
3. Какова цена Unitree G1 и как она соотносится с конкурентами?
G1 обычно воспринимается как более доступная точка входа в сегмент гуманоидов. Но итоговая стоимость зависит от версии, конфигурации, доставки, налогов и рынка. С конкурентами его корректнее сравнивать не только по цене, но и по уровню открытости платформы и реальной пригодности под ваш сценарий.
4. Может ли Unitree G1 выполнять акробатические маневры, такие как боковое сальто?
Да, такие демонстрации обсуждаются как показатель высокого уровня динамического контроля. Но для выбора платформы это не должен быть единственный критерий.
5. Unitree лучше, чем Tesla Optimus?
Корректнее говорить не «лучше или хуже», а «для чего подходит». Unitree интересен тем, что у бренда уже есть понятные платформы для исследований и пилотов. Tesla Optimus — очень важный проект, но сравнивать его с G1 или H1 по принципу прямого потребительского выбора пока не всегда корректно.