Роботы
Роботы для образования
Промышленные роботы
Роботизированные руки
Лидар
Компоненты
Гуманоиды
Роботы гуманоиды
G1 модификации
Ловкая рука
Индустрия
Сервис
Компания
Если вам нужна собака-робот Unitree, выбирать модель стоит не по эффектным роликам, а по задаче: для обучения важны SDK, ROS и простота запуска, для R&D — гибкость настройки и доступ к разработке, для охраны и обходов — автономность, датчики и связь, для промышленности — проходимость, защита корпуса и полезная нагрузка. В линейке компании Unitree Robotics это обычно означает следующее: Go1 — более ранний и легкий класс, Go2 — актуальная потребительская и образовательная платформа, а Unitree B2 — уже промышленный уровень. При этом реальные возможности зависят от версии и комплектации.
Если вас интересует робопес Unitree, после этого материала будет проще понять, какую модель брать под свой сценарий, какие характеристики действительно важны и где заканчивается эффект новизны и начинается реальная рабочая польза. Мы разберем выбор от общего к частному: от задач и условий среды до сенсоров, автономности, программной среды и бюджета.
Главные советы
Начинайте не с модели, а со сценария работы.
Для обучения и R&D важнее программная среда, чем рекордная скорость.
Для охраны и инспекций критичны датчики, связь, зарядка и IP-рейтинг.
Грузоподъемность и устойчивость важнее красивых трюков на видео.
У Unitree одна и та же линейка может сильно отличаться по версиям и комплектациям.
Робот-собака сегодня — это не только демонстрация возможностей робототехники, но и практический инструмент для обходов, съема данных, обучения, тестирования ИИ-систем и автоматизации повторяющихся маршрутов. На рынке заметны Unitree Robotics, Boston Dynamics и DEEPRobotics: у всех есть решения для инспекций, исследований и сложной среды, но у Unitree особенно широкая вилка — от сравнительно доступных моделей до тяжелых промышленных платформ.
Чаще всего робособаки Unitree рассматривают для таких сценариев:
R&D и прикладные эксперименты в области робототехники и искусственного интеллекта.
Образование, STEM-лаборатории, кружки и университетские проекты.
Инспекции на производстве, в энергетике, на складах и протяженных объектах.
Патрулирование территории и сбор телеметрии для служб безопасности.
Демонстрации, мероприятия, шоу-форматы и клиентские презентации.
Домашнее применение, хобби и знакомства с современной мобильной робототехникой.
Пилотные проекты интеграторов, где нужно проверить сценарий до масштабирования.
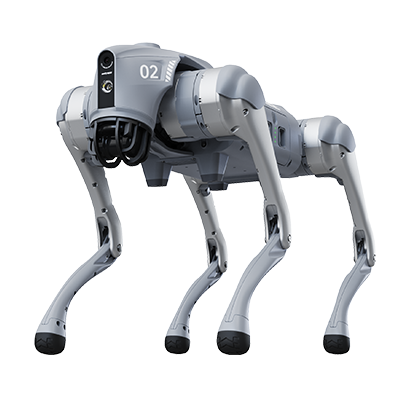
Для дома и развлечений такие платформы интересны тем, кто хочет увидеть живую механику, управление через приложение, следование за человеком и базовые сценарии взаимодействия. Но здесь важно честно разделять пользу и вау-эффект: для большинства частных пользователей это скорее дорогой техно-гаджет и учебная платформа, чем замена питомцу. Go1 у Unitree позиционировался как потребительский бионический квадрупед-компаньон, а Go2 получил более современную систему восприятия, картографирование на базе лидара и удаленный мониторинг через приложение.
Если говорить совсем прямо, бионический робот-собака Unitree в домашнем формате полезен там, где человеку интересны робототехника, программирование, контент и эксперименты. Если же цель — просто чтобы походил по квартире, ценность быстро снижается: обслуживание, безопасность пространства и цена владения никуда не исчезают.
Школам, вузам, STEM-лабораториям и инженерным командам робот-собака полезен как наглядная платформа, где видно связь между кодом, сенсорами, движением и поведением машины. Если нужно выбрать собаку-робота для учебной программы, смотрите не только на сам корпус, но и на то, насколько легко подключить сценарии управления, получить телеметрию и встроить платформу в занятия по ИИ, компьютерному зрению и системам навигации. Для Go1 уже существует ROS2-драйвер, а Go2 и B2 поддерживают официальный стек Unitree ROS2 и Unitree SDK2 — официальный SDK второго поколения для разработки под роботов Unitree.
Проще говоря, SDK — это набор инструментов для разработчика, API — способ «разговаривать» с роботом из своей программы, а ROS/ROS2 — популярная программная среда, в которой удобно собирать робота из модулей: управление, одометрия, сенсоры, карты, навигация. Для преподавателя это означает меньше ручной рутины, для студента — более короткий путь от теории к реальному движению платформы.
В промышленной среде робот-собака нужен не потому, что он умеет ходить на четырех ногах, а потому, что он может пройти туда, где колесной платформе сложно: лестницы, решетки, неровный пол, открытые площадки, переходы между зонами. Здесь уже на первый план выходят не трюки, а проходимость, надежность связи, автономность, полезная нагрузка, защита корпуса и возможность работать с тепловизией, камерами, лидарами и внешними модулями.
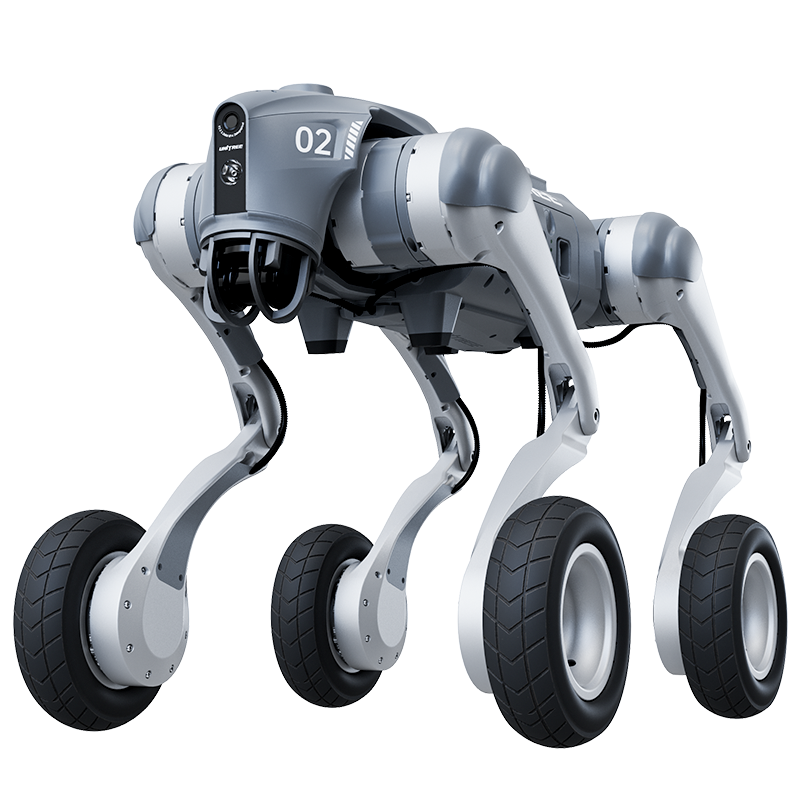
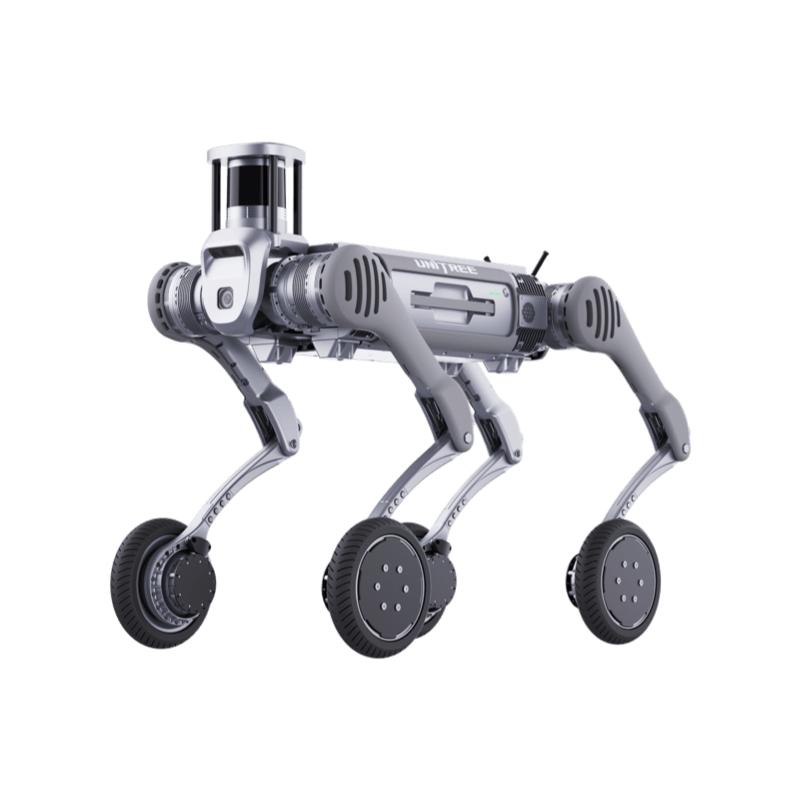
Для таких задач логично смотреть в сторону Unitree B2. Официальная страница описывает его как промышленный квадрупед с высокой проходимостью, опциональным колесно-шагающим форм-фактором, IP67, полезной нагрузкой более 40 кг в движении, временем непрерывной ходьбы более 5 часов без нагрузки и сенсорным стеком, который может включать 3D-лидар, камеры глубины и оптические камеры в зависимости от конфигурации. Это уже уровень, где робота можно рассматривать для обходов, мониторинга и патрулирования территории, то есть промышленное применение, а не только для демонстраций.
Важно и то, что для охраны робот сам по себе не является «волшебной» заменой людям и существующей системе безопасности. На практике он полезнее как мобильный носитель данных — для маршрутов, видео, теплового контроля, обходов и удаленного присутствия оператора.
Технические параметры важно оценивать не сами по себе, а в связке с задачей. Одинаковая цифра в таблице может означать разную ценность: например, высокая скорость почти не помогает в аудитории, а на большом промышленном объекте критичнее устойчивость, зарядка и качество навигации.
Мобильность влияет на все: сможет ли робот пройти маршрут без застреваний, удержится ли при повороте, как поведет себя на плитке, решетке, асфальте, в коридоре или на лестнице. У Go2 производитель указывает до примерно 5 м/с в лабораторных условиях, а у B2 — более 6 м/с в специальной конфигурации, при этом для обоих продуктов компания отдельно отмечает, что часть параметров зависит от версии, сценария и ограничивается соображениями безопасности. Это важный сигнал: смотреть нужно не на максимальную цифру, а на стабильность на вашем маршруте.
Проверять мобильность лучше простыми практическими тестами:
Прогоните робота по маршруту с порогами, кабель-каналами и разворотами.
Проверьте движение по узкому коридору с внезапным препятствием.
Оцените устойчивость при остановке, толчке и повторном старте.
Посмотрите, как меняется поведение с полезной нагрузкой на корпусе.
Отдельно протестируйте покрытие, на котором робот будет работать постоянно.
Паспортная автономность почти всегда отличается от реальной. На нее влияют скорость движения, карта маршрута, активность камер и лидар, температура, наличие внешней нагрузки, частые старты и остановки, связь по 4G/Wi-Fi и вычислительная нагрузка на ИИ-системы. Поэтому красивое значение из спецификации нужно читать как ориентир для базового режима, а не как гарантию на любой объект.
Ниже — удобный способ смотреть на автономность без ложной точности:
| Сценарий работы |
Что обычно происходит со временем работы? |
Как трактовать цифры производителя? |
| Спокойная демонстрация в помещении | Ближе всего к заявленным значениям | Можно использовать как базовый ориентир |
| Обход с активной навигацией и картографированием | Время работы заметно снижается | Нужен запас на датчики и вычисления |
| Инспекция с полезной нагрузкой | Батарея садится быстрее | Проверяйте данные именно под вашей нагрузкой |
| Улица, холод, жара, частые перезапуски | Разброс становится еще сильнее | Без пилота на площадке цифры лучше не принимать как обещание |
По официальным данным Go2 имеет заметный разброс по версиям: для AIR, PRO на странице указано около 1–2 часов, а для EDU — около 2–4 часов. B2 указывается как платформа с более чем 5 часами ходьбы без нагрузки и более чем 4 часами при 20 кг нагрузки, причем производитель отдельно пишет, что параметры меняются в зависимости от конфигурации и сценария.
Камеры, лидары, датчики препятствий и позиционирование нужны не «для галочки», а для понятной пользы. Лидар помогает видеть препятствия и строить карту пространства. Камеры дают картинку оператору и могут использоваться для распознавания объектов. Модуль позиционирования помогает следованию и контролю маршрута. Для пользователя это означает одно: робот увереннее движется в коридорах, на складе, на лестничных маршах и на сложной площадке.
У Go2 на официальной странице акцент сделан на собственный 3D-лидар, 3D-картографирование и ISS 2.0, а у B2 — на конфигурируемый промышленный стек с 3D-лидаром, камерами глубины и оптическими камерами. Если задача — обучение и базовая автономия, вам важна доступность этих функций. Если задача — инспекция и охрана, важнее совместная работа сенсоров, связь и возможность интеграции данных в существующую систему.
IP-рейтинг показывает, насколько корпус защищен от пыли и воды. В реальной закупке это один из самых недооцененных критериев: можно купить очень умную платформу и затем выяснить, что для дождя, брызг, мокрой пыли или мойки зоны она просто не рассчитана.
| Уровень защиты | Где обычно уместен? | Что важно помнить? |
| IP54–IP55 | Помещения, лаборатории, чистые склады | Подходит не для любой улицы и не для тяжелой среды |
| IP66 | Пыльные и влажные зоны, наружные обходы | Нужна проверка по температуре и химии среды |
| IP67 | Улица, дождь, сложные промышленные объекты |
Это серьезный плюс, но не повод игнорировать регламент эксплуатации |
Для Unitree B2 официально заявлен IP-рейтинг IP67, поэтому именно такие машины обычно рассматривают там, где среда жестче и нужен запас по надежности. Для более легких и гражданских платформ лучше не предполагать промышленную защиту по умолчанию, а запрашивать спецификацию на вашу комплектацию.
Программная среда определяет, насколько быстро вы дойдете от «робот едет» до «робот решает мою задачу». Кому-то достаточно приложения и готовых режимов. Инженеру нужен SDK. Интегратору — API и ROS. Исследовательской группе — еще и симуляция, чтобы сначала проверить логику в безопасной среде, а потом перенести ее на реальную платформу. Официальный ROS2-стек Unitree поддерживает Go2 и B2, а экосистема Unitree в целом завязана на SDK2 и открытые инструменты для разработки.
Популярные программные подходы выглядят так:
Готовые режимы и приложение. Плюс — быстрый старт. Минус — мало гибкости.
SDK/API. Плюс — можно строить свою логику и интеграции. Минус — нужна команда разработки.
ROS/ROS2. Плюс — стандартный язык современной робототехники, удобно работать с навигацией, одометрией и сенсорами. Минус — выше порог входа.
Симуляция перед выездом на объект. Плюс — дешевле и безопаснее проверять гипотезы. Минус — симуляция не заменяет полевые тесты.
Смотреть нужно сразу на три вещи: массу платформы, допустимую нагрузку и то, как эта нагрузка влияет на устойчивость. Легкого робота удобнее перевозить и запускать в аудитории. Тяжелый сложнее логистически, зато он лучше подходит под реальные индустриальные модули, дополнительные сенсоры и длительные обходы.
По официальным страницам картина такая: Go1 весит около 12 кг и рассчитан примерно на 3–5 кг адаптивной нагрузки, Go2 — около 15 кг и несет порядка 7–8 кг в зависимости от версии, а Unitree B2 весит около 60 кг и рассчитан на существенно более серьезные нагрузки — более 40 кг в движении и от 120 кг в статике. Поэтому для камеры, лидаров и учебных экспериментов хватит легких моделей, а для тяжелого полезного груза — уже нет.
Ниже — практическое сравнение трех самых обсуждаемых направлений в линейке Unitree. Здесь важно помнить: даже внутри одной модели функции могут отличаться по версии, а некоторые возможности требуют вторичной разработки, отдельного вычислительного модуля или поставки в нужной конфигурации.
| Модель | Для каких задач подходит? | Мобильность | Автономность | Сильные стороны | Ограничения |
| Go1 | Демонстрации, базовое обучение, HRI, первые R&D-пилоты | Легкий и быстрый для своего класса | Зависит от версии и состояния поставки | Небольшая масса, наглядность, проще возить и запускать | Более раннее поколение, скромнее полезная нагрузка |
| Go2/Go2 Pro | Обучение, STEM, актуальные пилоты, часть R&D, контент и демонстрации | Более современное восприятие, хорошие возможности для сложных поверхностей | От примерно 1–2 часов у младших версий до 2–4 часов у EDU | Лучший баланс актуальности, экосистемы и цены входа | Продвинутые функции и вторичная разработка сильнее зависят от версии |
| B2 | Индустрия, инспекции, охрана, тяжелые outdoor-сценарии, интеграционные проекты | Профессиональная проходимость, лестницы, уклоны, серьезная нагрузка | Более 5 часов без нагрузки, более 4 часов с 20 кг по данным производителя | Нагрузка, выносливость, защита, промышленная логика применения | Дороже, сложнее внедрение и эксплуатация |
Эта таблица собрана по официальным страницам Unitree и документации ROS. Часть цифр и функций зависит от версии, поэтому там, где производитель сам делает оговорку о конфигурации, лучше опираться не на общую страницу, а на коммерческую спецификацию под вашу поставку.
Базовый уровень. Если нужен самый аккуратный вход в тему, сегодня чаще разумнее смотреть на Go2 Air или на остатки Go1, но с разной логикой. Go1 — это более ранняя платформа, которая все еще может быть полезной для демонстраций и базового обучения. Go2 — более современная экосистема. На официальной странице Go2 указаны цены без налогов и доставки: AIR — 1600 долларов США, PRO — 2800 долларов США, X — 4500 долларов США, а EDU — по запросу. В официальном магазине Go1 встречается от 2700 долларов США, поэтому актуальный «входной» баланс нередко оказывается уже на стороне Go2.
Средний сегмент. Здесь особенно интересен Unitree Go2 Pro. Он уже дает современную платформу с 3D-лидароми, ISS 2.0, связью и актуальной логикой продукта, но без избыточной тяжести промышленного класса. Для учебных центров, демонстрационных залов, кружков, инженерных команд и пилотов это часто лучший компромисс. Если же проект подразумевает программирование робота, работу через SDK, ROS2, внешние модули и вторичную разработку, стоит выбирать именно Go2 EDU. Версия Go2 Pro больше подходит для готовых сценариев, демонстраций и управления через приложение, но для полноценной разработки и программирования через SDK она не предназначена.
Профессиональный сегмент. Unitree B2 имеет смысл там, где робот должен реально приносить операционную пользу: патрулировать, нести нагрузку, жить на объекте, работать под дождем и проходить тяжелый маршрут. Здесь вопрос цены вторичен по сравнению со стоимостью внедрения, интеграции и отказоустойчивости. Иными словами, B2 обычно выбирают не под интерес, а под бизнес-кейс.
Если задача — R&D, берите Go2 EDU, когда важны актуальная платформа, картографирование, программная среда и быстрый старт команды. B2 имеет смысл только тогда, когда исследования сразу завязаны на улицу, нагрузку, тяжелые сенсоры или промышленное применение.
Если задача — обучение, чаще всего достаточно Go2 Pro или Go2 EDU. Для школы, вуза и кружка это разумный баланс между наглядностью, возможностями программирования и стоимостью входа. Go1 все еще может подойти, если бюджет ограничен и сценарий не требует самой новой платформы.
Если задача — охрана, не оценивайте робота как автономного «сторожа». Правильнее рассматривать его как мобильный узел данных для маршрутов, видео, датчиков и удаленного присутствия. Для уличных и тяжелых условий логичнее B2, Go2 годится скорее для контролируемых пилотов, внутренних обходов и демонстрационных кейсов.
Если задача — индустрия, выбор обычно проще всего: Unitree B2. Его сильная сторона — не один красивый параметр, а совокупность признаков промышленной машины: нагрузка, автономность, IP67, проходимость, сенсоры и варианты вычислительной конфигурации.
Опишите маршрут робота в реальных условиях — лестницы, уклоны, покрытие, улица или помещение.
Составьте список обязательных функций — карта, удаленный мониторинг, лидар, камера, полезная нагрузка, интеграция.
Определите, кто будет работать с роботом — оператор через приложение, преподаватель, разработчик ROS, интегратор.
Сравните не только цену покупки, но и цену запуска — обучение команды, зарядная логистика, ПО, сервис.
Попросите пилот или демонстрацию именно на вашем сценарии, а не только в шоу-режиме.
Практический вывод простой: нет лучшей модели для всех. Если вам нужно выбрать робособаку для обучения и пилотов — чаще выигрывает семейство Go2. Если нужен доступный вход и более старая платформа не пугает — можно рассматривать Go1. Если же робот должен приносить пользу на объекте, а не только впечатление на демонстрации, смотрите в сторону B2. Именно так выбор становится инженерным и бизнес-обоснованным, а не эмоциональным.
Ключевые выводы
Сначала зафиксируйте задачу и среду.
Затем проверьте сенсоры, связь и автономность под реальный маршрут.
После этого оцените программную среду: приложение, SDK, API, ROS.
Отдельно сравните полезную нагрузку и устойчивость.
И только потом принимайте решение по бюджету и комплектации.
1. Как выбрать робота-собаку?
Начните с задачи: обучение, R&D, охрана или индустрия. Затем проверьте среду работы, нужные датчики, программную среду и автономность. Так вы поймете не просто модель, а реальную конфигурацию под проект.
2. Какие характеристики стоит учитывать при выборе?
Главные параметры — проходимость, время работы, системы навигации, IP-рейтинг, полезная нагрузка и доступность SDK/ROS. Для пилота внутри помещения и для промышленного объекта это будут разные приоритеты.