Роботы
Роботы для образования
Промышленные роботы
Роботизированные руки
Лидар
Компоненты
Гуманоиды
Роботы гуманоиды
G1 модификации
Ловкая рука
Индустрия
Сервис
Компания
Гуманоидные роботы Unitree уже умеют ходить, удерживать равновесие, ориентироваться по сенсорам, выполнять демонстрационные сценарии, работать как платформа для обучения алгоритмов и в некоторых конфигурациях решать базовые задачи манипуляции предметами. На практике такие системы полезны прежде всего в образовании, исследованиях, пилотных сервисных сценариях, технологических демонстрациях и в отработке будущих промышленных процессов, но пока не являются универсальной заменой человеку в быту или на производстве.
Еще недавно человекоподобные роботы казались сюжетом научной фантастики, а сегодня рынок уже движется от эффектных роликов к прикладной робототехнике. Интерес к ним подогревают массовая культура, ожидания от искусственного интеллекта и стремление бизнеса автоматизировать среду, которая изначально построена под человека — лестницы, двери, инструменты, рабочие места и зоны обслуживания. При этом исследования показывают, что медиа часто завышают ожидания от роботов, а реальный контакт с ними обычно делает картину более трезвой.
Ключевые выводы
Человекообразная форма полезна там, где среда сделана под людей. Но это не означает, что антропоморфность всегда лучше специализированной машины.
Главный рычаг прогресса сейчас — связка механики, сенсоров и ИИ. Именно обучение по демонстрациям, обучение с подкреплением, крупные модели и качественные данные расширяют практические возможности современных платформ.
Для коммерческого применения уже важны не только «умения», но и право, безопасность и приватность. В ЕС такие системы попадают в поле AI Act, требований к машинам и правил защиты персональных данных.
Если говорить просто, гуманоидные роботы — это машины, построенные по логике человеческого тела и движений: у них есть торс, ноги, часто руки, а сама конструкция рассчитана на работу в среде, которую люди уже создали под себя. В отраслевых материалах такие системы описывают как шаг к универсальным роботам, основанным на человеческой механике движения.
Человекоподобный робот — это не обязательно машина, которая выглядит как человек до мелочей. Достаточно того, что она повторяет человеческую кинематику и может взаимодействовать с привычным пространством — проходами, лестницами, дверями, столами, конвейерами. Робот-гуманоид — это прежде всего про форму, баланс, координацию и универсальность среды, а не про «человеческое лицо».
Ключевые признаки такого класса:
Двуногая или близкая к человеческой схема передвижения.
Наличие корпуса, рук и набора суставов с несколькими степенями свободы.
Способность удерживать баланс и корректировать позу в реальном времени.
Использование сенсоров для восприятия людей, объектов и пространства.
Возможность работать в сценариях, где уже есть «человеческая» инфраструктура.
Путь от концептов к практическим машинам занял десятилетия. Один из важнейших этапов связан с проектом ASIMO компании Honda: в 2000 году робот получил более плавную походку и возможность двигаться в обычных пространствах со ступенями и уклонами, а затем — функции распознавания жестов, лиц и даже элементы работы в роли рецепциониста. Это был важный переход от лабораторной демонстрации к идее реального сосуществования с людьми.
Следующий заметный этап связан с Boston Dynamics. Их Atlas долго был символом динамики, баланса и сложной моторики в исследовательской робототехнике, а к 2026 году компания уже позиционирует Atlas как промышленного гуманоидного робота для транспортировки материалов (material handling), интеграции в рабочие процессы и автономной подзарядки. Именно так эволюция рынка выглядит сегодня: от зрелищных роликов — к задачам склада, фабрики и сервиса.
Массовая культура давно научила аудиторию ждать от гуманоидов либо идеального помощника, либо опасного соперника. Исследования по восприятию социальных роботов показывают, что именно медиа и научная фантастика часто формируют завышенные ожидания относительно их навыков, самостоятельности и роли в обществе.
В реальности разрыв между ожиданием и возможностями все еще велик. Современные машины уже умеют впечатляюще двигаться и лучше понимают среду, чем несколько лет назад, но они далеки от универсального «электронного человека», который одинаково хорошо разговаривает, ремонтирует, ухаживает, готовит и принимает решения без ограничений. Именно поэтому грамотный разговор о рынке начинается не с вау-эффекта, а с конкретных сценариев применения.
Современный гуманоид — это связка механики, приводов, сенсоров, алгоритмов баланса и программного управления. Условно говоря, «железо» отвечает за движение, сенсоры — за восприятие мира, а управляющая система — за то, чтобы робот не просто шел, а понимал, где он находится, что перед ним и какое действие безопасно. Для этого используются суставные моторы, энкодеры, камеры, лидары, микрофоны и модели, которые объединяют восприятие, планирование и действие.
Ключевые технологии здесь:
электроприводы и суставы с высокой точностью управления;
энкодеры и контуры обратной связи для контроля положения и скорости;
камеры и лидары для построения картины пространства;
системы стабилизации и контроль всего тела (whole-body control) для удержания равновесия;
программная среда для обучения, моделирования, телеприсутствия и обновлений.
Роботы-гуманоиды с искусственным интеллектом отличаются от жестко запрограммированных систем тем, что не сводятся к набору фиксированных команд. Они используют модели восприятия, обучения и планирования, чтобы лучше распознавать обстановку, адаптироваться к вариациям задачи и переносить навыки между похожими сценариями. Unitree прямо указывает на обучение по демонстрациям и обучение с подкреплением, а также развивает отдельную платформу для сбора данных, обучения моделей и интеграции с открытыми фреймворками и моделями.
Если упростить, роботы-гуманоиды с ИИ уже ближе не к «автомату по скрипту», а к системе, которая учится на данных и становится лучше после дообучения. Аналогичный подход виден и у других игроков рынка: Boston Dynamics говорит о передаче выученных навыков на весь парк Atlas, а UBTECH — о принятии решений на базе мультимодальных моделей и интеграции LLM в Walker S.
За внешне эффектной походкой стоит довольно приземленная эксплуатация. Пользователю нужны корректная установка батареи, контроль температур и тревог, диагностика аномалий, периодическая калибровка суставов, безопасный запуск и остановка, а также обновления ПО. В документации Unitree прямо описаны процедуры запуска, режимы отладки и приложения для мониторинга состояния машины.
Это важно по двум причинам. Во-первых, гуманоид — не бытовой гаджет: у него сложная механика и высокая мощность. Во-вторых, значительная часть проблем на практике связана не с «плохим» ИИ, а с эксплуатацией — от калибровки и зарядки до конфликтов управляющих команд и работы в неподходящей среде.
Проще всего классифицировать такие системы по четырем осям: по задаче, конструкции, уровню автономности и сфере применения. Рынок уже показывает, что один и тот же внешний класс может скрывать очень разные роли — от исследовательской платформы до промышленного исполнителя.
|
Критерий |
Основные типы |
Что это значит на практике? |
|
По задачам |
Исследовательские, сервисные, промышленные, демонстрационные |
Одни нужны для разработки алгоритмов, другие — для работы с людьми или в пилотных производственных процессах |
|
По конструкции |
Компактные, полноразмерные, с простыми кистями, с более развитой манипуляцией |
Чем сложнее руки и суставы, тем шире манипуляция, но тем выше требования к надежности и сервису |
|
По автономности |
Телеметрия и teleop, полуавтономные, более автономные |
Большинство реальных внедрений пока опирается на смешанный режим, а не на полную самостоятельность |
|
По сферам применения |
Образование, R&D, шоу и мероприятия, производство, логистика, сервис, ассистивные сценарии |
Один и тот же корпус может использоваться как учебная платформа, демонстратор технологий или исполнитель ограниченной рабочей операции |
|
|
Такую логику подтверждают отраслевые обзоры IFR и продуктовые линейки Unitree, UBTECH и Fourier, которые по-разному позиционируют свои платформы — от research-first до enterprise-first.
Китайские человекоподобные роботы сегодня задают высокий темп рынку не только из-за количества стартапов, но и благодаря ставке на масштабируемую цепочку поставок, наращивание производства и интеграцию робототехники с ИИ. IFR прямо отмечает, что Китай сделал гуманоидов частью национальной стратегии и отдельно делает упор на масштабируемую цепочку поставок для ключевых компонентов.
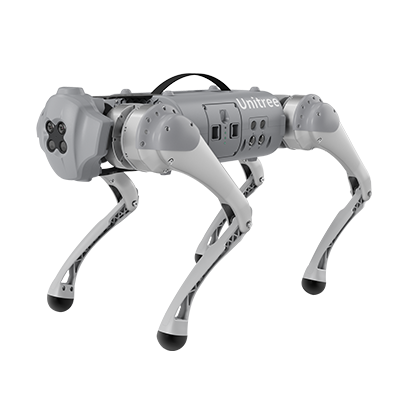
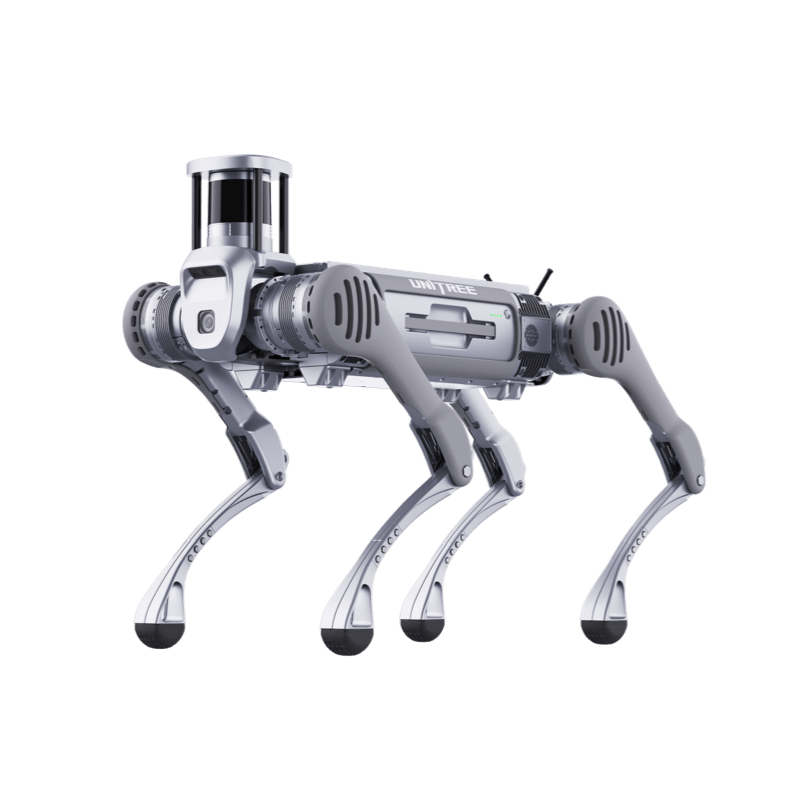
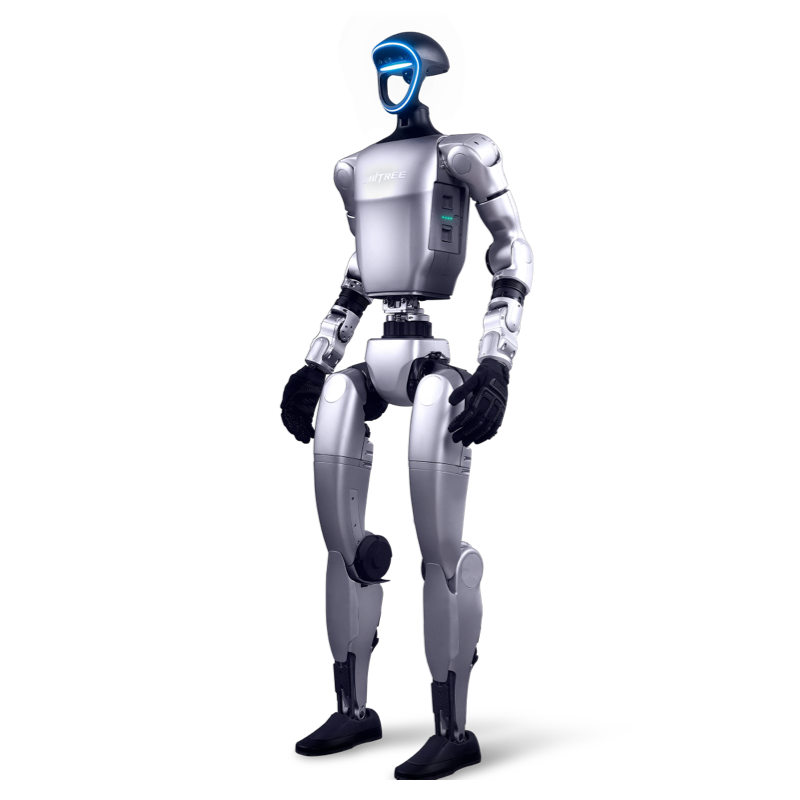
Гуманоидный робот Unitree G1 — это компактная платформа ростом 132 см и массой около 35 кг. В зависимости от версии он предлагает 23–43 степени свободы, использует камеру глубины и 3D-лидар, имеет около 2 часов автономности, поддерживает OTA-обновления, а в EDU-конфигурации может оснащаться вычислительным модулем NVIDIA Jetson Orin и более сложной рукой.
Чем он интересен рынку? Прежде всего сочетанием компактности, развитой подвижности, сенсорного набора и ориентации на дальнейшую разработку. Как модель робота-гуманоида, G1 выглядит не как законченный «цифровой сотрудник», а как платформа для экспериментов, пилотов, обучения моделей и демонстрации embodied AI в понятной форме.
Реалистично позиционировать G1 стоит как:
учебную и исследовательскую платформу для лабораторий и вузов;
базу для тестирования алгоритмов восприятия, движения и манипуляции;
роботизированный демонстратор для выставок, презентаций и публичных показов технологий;
задел под будущие прикладные сценарии в сервисе и легких операциях с объектами, но не как полностью готового универсального исполнителя.
Важное уточнение: сам производитель предупреждает, что гуманоидная отрасль все еще на раннем этапе, а часть демонстрируемых функций находится в разработке и тестировании. Поэтому корректнее говорить не о «чудо-роботе», а о заметном примере того, как рынок переходит от шоу-роликов к платформам реального использования.
Антропоморфные роботы хороши не всегда. Их главное преимущество — работа в мире, который уже адаптирован под человеческое тело. Но за это приходится платить сложностью механики, требованиями к балансу, стоимости сервиса и ограничениями по надежности. Даже Boston Dynamics прямо подчеркивает: человекоподобная форма полезна, но не должна ограничивать машину человеческим диапазоном движений и не всегда является наиболее эффективной формой выполнения задачи.
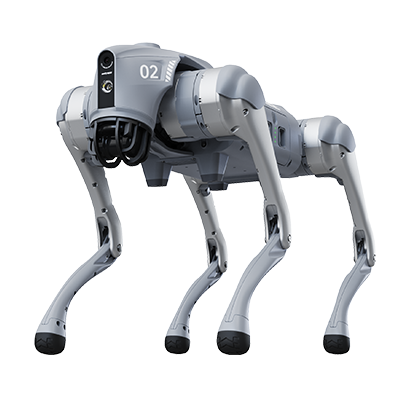
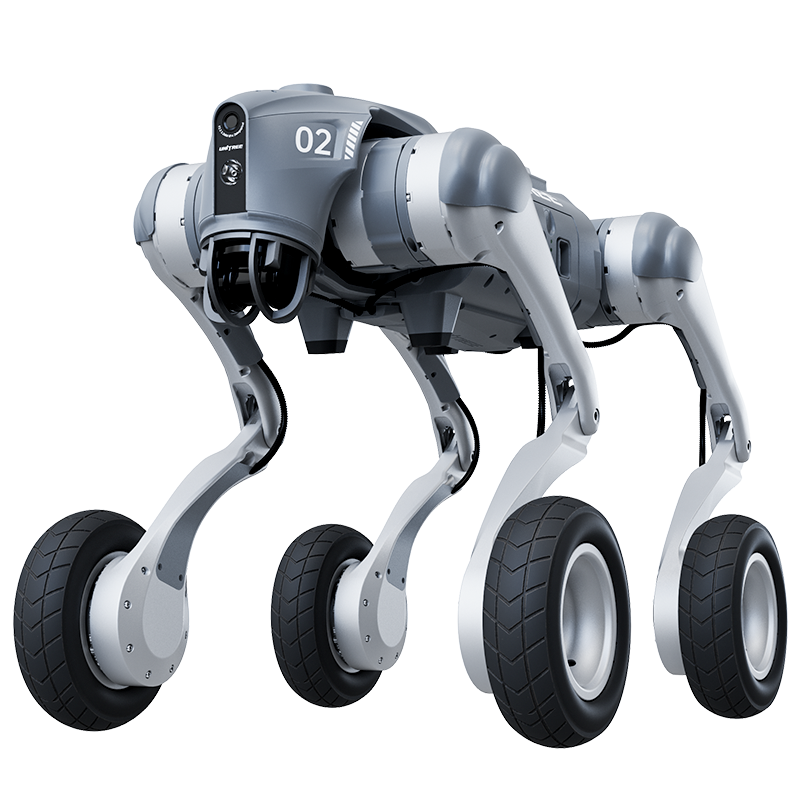
Поэтому во многих случаях специализированные системы оказываются практичнее: колесный робот проще в помещении, манипулятор точнее на фиксированном участке, а квадропод устойчивее на сложной поверхности. IFR тоже ожидает не замену существующих роботов гуманоидами, а скорее дополнение текущего парка технологий. Это важный экономический аргумент против идеи, что все будущее — только за андроидами.
Сегодня реалистичные сценарии выглядят так:
Образование и исследовательская среда. Платформы вроде G1 и GR-1 подходят для обучения, тестов управления, компьютерного зрения, ROS-интеграции и embodied AI.
Демонстрации и мероприятия. Здесь важны зрелищная мобильность, безопасное взаимодействие, голосовой интерфейс и наглядное объяснение технологии широкой аудитории.
Производство и логистика. Наиболее зрелые сценарии — транспортировка материалов, синхронные операции на линии, сканирование, интеграция в MES/WMS и повторяемые действия в контролируемой среде.
Медицина и уход. Пока это скорее ассистивные, исследовательские и реабилитационные направления, а не полноценная замена медицинского персонала. Вопросы безопасности здесь особенно критичны.
Сервис и клиентское взаимодействие. Исторически подобные функции тестировались еще на ASIMO, а современные платформы добавляют мультимодальное взаимодействие и языковые модели.
Что современные гуманоиды действительно умеют:
ходить, поворачиваться, стабилизироваться и работать с изменением позы;
видеть пространство через камеры и лидары, обходить препятствия, строить маршрут;
выполнять часть манипуляционных действий — особенно в контролируемых условиях и при дообучении;
осваивать новые навыки через данные, модели и обновления.
Где ограничения пока очевидны:
универсальная бытовая автономность все еще далека от нормы;
время работы, нагрузка на руки и надежность сложных сценариев остаются узким местом. Для G1, например, производитель указывает около 2 часов автономности и сравнительно небольшой полезный груз на руку;
безопасность рядом с человеком требует осторожности, сервисных процедур и правовой оценки.
Именно здесь научная фантастика чаще всего сбивает ожидания: зритель видит пластичную походку и начинает думать, что перед ним почти человек. На деле же перед нами пока очень интересный, но все еще ограниченный инструмент.
Главные этические вопросы вокруг гуманоидов — это безопасность физического контакта, приватность при работе камер и микрофонов, доверие к машинам, риск смещения труда и прозрачность принятия решений ИИ. С ростом коммерческого использования эти темы становятся не философскими, а операционными: бизнесу приходится думать не только о полезности робота, но и о том, какие данные он собирает, как он взаимодействует с людьми и кто отвечает за сбой.
На горизонте 5–10 лет наиболее вероятен не приход универсального андроида в каждый дом, а рост числа пилотов и специализированных внедрений в промышленности, логистике, сервисе и исследовательской среде. Это не жесткий прогноз, а аккуратный вывод из текущего состояния рынка: IFR прямо пишет, что гуманоиды скорее дополнят существующих роботов, чем вытеснят их.
Термин «зловещая долина» ввел Масахиро Мори: идея в том, что по мере роста человекоподобия симпатия к роботу может сначала увеличиваться, а затем резко падать, когда он становится «почти человеком», но все же заметно искусственным. Эта тема до сих пор важна для дизайна, потому что внешность и поведение напрямую влияют на принятие машины людьми.
Современные данные показывают более сложную картину, чем в классической формуле, но общая проблема не исчезла: слишком человекоподобный внешний вид без достаточной естественности движений и общения может вызывать напряжение. Для бизнеса это означает простую вещь — дизайн должен поддерживать доверие, а не мешать внедрению.
Правовая база по миру действительно неравномерна. В ЕС правила уже формируются достаточно системно: AI Act разворачивается поэтапно, с полным внедрением, запланированным к 2 августа 2027 года. Параллельно для коммерческого использования важны требования к машинам и защите персональных данных.
Для практики это означает следующее:
если гуманоид использует ИИ в значимом сценарии, нужно оценивать требования AI Act;
если речь идет о физическом оборудовании, критичны нормы машинной безопасности и оценка рисков;
если робот снимает людей, слушает команды или работает в публичном пространстве, встают вопросы GDPR и privacy-by-design;
за пределами ЕС единая обязательная база слабее, поэтому компании нередко опираются на добровольные фреймворки вроде NIST AI RMF и отраслевые правила.
Что такое человекоподобный робот?
Человекоподобный робот — это машина, построенная по логике человеческого тела и движений, чтобы работать в среде, созданной под людей. Обычно речь идет о ногах, руках, корпусе, сенсорах и системах баланса.
Зачем нужны гуманоидные роботы?
Они нужны там, где среда уже «человеческая» и дорого перестраивать ее под обычную автоматику: в сервисе, исследованиях, пилотном производстве, логистике, образовании и демонстрациях технологий.
Каковы сферы применения человекоподобных роботов?
Сегодня это образование, R&D, мероприятия, ограниченные промышленные и логистические операции, сервисные сценарии, а также ассистивные и реабилитационные направления.
Что умеют роботы гуманоиды?
Они умеют ходить, стабилизироваться, воспринимать обстановку через сенсоры, выполнять часть манипуляций и улучшать навыки за счет обучения на данных. Но универсальная автономность и «человеческая»универсальность пока недостижимы.
Какие этические вопросы возникают при разработке человекоподобных роботов?
Безопасность, приватность, доверие, влияние на труд, прозрачность ИИ и границы допустимого использования в публичной и рабочей среде.
Гуманоидные роботы — это уже не фантастика, а реальный инструмент современной робототехники. Но их сила не в мифической почти человеческой природе, а в конкретной полезности: работе в человеческой среде, сборе и отработке данных, демонстрации embodied AI, пилотных сервисных и промышленных сценариях. Unitree G1 здесь важен как актуальный, наглядный и сравнительно доступный пример того, куда движется рынок — к более практичным, обучаемым и прикладным платформам. Наибольшая польза от него сегодня очевидна там, где нужны исследования, обучение, презентация технологии и тестирование будущих рабочих процессов без рекламной гиперболы.